Download
1 / 36
370 likes | 692 Views
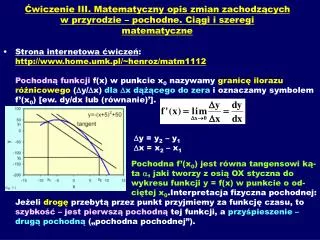
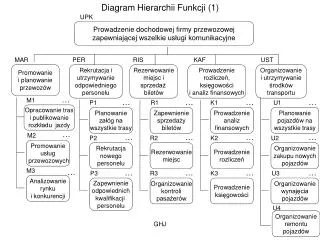
Pochodna funkcji jednej zmiennej. Pochodna wektora. Pochodna funkcji jednej zmiennej. Pochodną funkcji jednej zmiennej f ( ) , jest fun k c ja f ’( ) :. f. f( x ). df. D x. d x. x. Różniczka funkcji. f( x ).

E N D
Pochodna funkcji jednej zmiennej Pochodną funkcji jednej zmiennej f(),jest funkcja f ’(): f f(x) df Dx dx x
Różniczka funkcji f(x) Infinitezymalna zmiana dfwartości funkcjif(x)spowodowana infinitezymalną zmianą dxjej argumentu nazywa się różniczką funkcji. df x dx
Użyteczne pochodne a=const, f(x), u(x), v(x) - funkcje 0
Interpretacja geometryczna pochodnej f(x) df a Pochodna jest równa tangensowi kąta nachylenia stycznej do wykresu funkcji w danym punkcie. x dx
Gdy argumentem funkcji jest czas… • Np. pochodna f’(t) po czasie
f f f () f (+) Pochodna wektora Pochodną funkcji wektorowej jednej zmiennej f(),jest funkcjaf ’():
Pochodna wektora Każdą składową wektora różniczkuje się osobno.
Wektor położenia, wektor przemieszczenia i wektor prędkości.
Punkt materialny Punkt materialny to obiekt o masie różnej od zera i zerowych rozmiarach. W wielu przypadkach rzeczywiste obiekty traktujemy jak punkty materialne. Dla ruchu translacyjnego można założyć, że obiekt to cząstka o masie równej masie obiektu umieszczonej w centrum jego masy.
Wektor położenia - Wektor związany z konfiguracją Wszechświata z Element zorientowany, który ma początek w początku układu odniesienia a koniec w punkcie o współrzędnej odpowiadającej położeniu punktu materialnego. z r r y O y x x r r= [x,y,z]
Wektor przemieszczenia Położenie cząstki może zmieniać się w czasie. Różnica wektorów położenia w dwóch różnych chwilach czasu t1i t2nazywa się wektorem przemieszczenia: z r r(t2) r(t1) r(t) y x r = r(t2) – r(t1)
v r(t) dr r(t+dt) Wektor prędkości Szybkość zmian wektora położenia cząstki nazywa się wektorem prędkości tej cząstki. z y x Prędkość chwilowa jest zdefiniowana jako granica szybkości zmian wektora położenia przy Dt dążącym do zera.
Prędkość chwilowa A3 A2 A4 A1 y B x Wektor prędkości chwilowej jest styczny do toru
Wektor prędkości chwilowej Wektor prędkości chwilowej jest styczny do toru w punkcie, w którym cząstka znajduje się w danej chwili Vp Vk
Prędkość chwilowa Przykład:
dr Szybkość Moduł wektora prędkości nazywa się szybkością Szybkość jest równa pochodnej drogi po czasie Na kolejnym wykładzie pokażemy, że droga jest równa całce z prędkości chwilowej po czasie.
Szybkość Przykład: ruch jednostajny po okręgu w płaszczyźnie xy
Średnia szybkość Średnia szybkość jest równa stosunkowi drogi do czasu, w którym cząstka tę drogę przebyła Na kolejnym wykładzie pokażemy, że
Przykład cd Obliczmy średnią szybkość po czasie równym okresowi (punkt wykonał jeden pełny obrót): v R Tymczasem wektor prędkości średniej po czasie T: l t x
v(t) v(t+dt) a(t) -v(t) dv v(t+dt) Wektor przyśpieszenia Szybkość zmian wektora prędkości cząstki nazywa się wektorem przyśpieszenia. z y Przyśpieszenie chwilowe jest zdefiniowane jako granica szybkości zmian wektora prędkości przy Dt dążącym do zera. x
v Średnie przyśpieszenie t1 Stosunek zmiany wektora prędkości do czasu, w którym zaszła ta zmiana nazywa się średnim przyśpieszeniem. t2 Na kolejnym wykładzie pokażemy, że
Prędkość i przyspieszenie jako pochodne V(t) x(t) a(t) x(0) a V(0) 0 t 0 t t 0
Użyteczne równania Przekształcając i otrzymujemy:
Rzut pionowy y y0 x Dla
Rzut poziomy y y0 x xmaks
Rzut ukośny y a x Składowe prędkości początkowej:
Rzut ukośny a x W kierunku x – ruch jednostajny W kierunku y – rzut pionowy I II
Rzut ukośny – zasięg a x z=zasięg I
Rzut ukośny – zasięg Maksymalny zasięg otrzymujemy dla tj. dla 2. Przy tej samej prędkości początkowej, taki sam zasięg otrzymujemy dla dwóch kątów dopełniających się do Wyznaczając kąt na podstawie funkcji sin zawsze otrzymujemy dwie wartości kąta