Download
1 / 24
240 likes | 364 Views
The new robotics control system, utilized by Beta teams at Wilsonville and Oregon City Robotics, introduces an advanced industrial controller from NI and a redesigned LabVIEW environment. This system empowers teams with less software experience to handle more complex tasks. Key features include a digital sidecar, power distribution modules, and integrated analog and pneumatic bumpers. While it offers a smaller footprint and enhanced capabilities, challenges like size, weight, cost, and availability must be addressed to ensure successful adoption across teams.

E N D
Overview of New System Beta Team from Wilsonville 1425 Wilsonville Robotics – Code Xero 2550 Oregon City Robotics
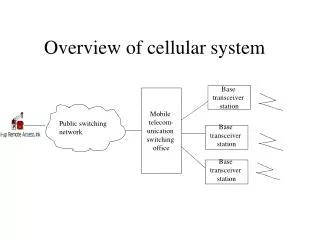
At a glance • Industrial Controller from NI • Everything else new except Spikes
Advantages of New System • Labview environment • Teams with less SW experience can do more complex stuff than before • Support of NI and WindRiver for development and debug environments • Smaller footprint of power distribution modules • Several nifty new features
Disadvantages of New System • Controller Size/Weight/Form Factor • Twice the footprint, weighs over 2 lbs. • Modules with bumpers not compact • Will need to be protected from contact • Cost and availability • Equipping teams for parallel development will be a challenge • New Jaguar speed controllers • Larger footprint • New control system less tolerant of low robot battery voltage
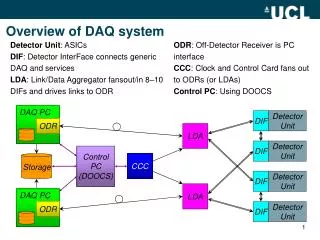
Elements of the New System • Digital Sidecar • Power Distribution Board • Analog Bumper • Pneumatics Bumper • Driver Station • Wireless Interface (802.11) • Camera • Jaguar Speed Controller
Digital Sidecar • Connects to cRIO9403 with 32-pin cable • Provides • 10 PWM outputs (Victors, Jaguars, RC servos) • Can be configured on a per-output basis to drive 6V RC servos with jumpers • 14 GPIO with +5V on each • 16 Relay Outputs • I2C headers (Standard and NXT-compatible) • 12V supply, • Provides +5V output • Reverse polarity protected
Power Distribution Module • Custom Design by FIRST • 6-15 VDC, reverse polarity protected • Metric shanks, not SAE! • 8 outputs for 40A breakers • 12 outputs for 30A/20A breakers • 24VDC output for CompactRIO • 12V output for gaming adapter • 5V output for camera or other devices • LED’s for power supplies and blown fuses
Analog Bumper • 5V/3A for powering sensors • 8 Analog Inputs, 3 pin PWM cable config. • Mounts to NI 9201 Analog Module • Configurable to make one input capable of measuring battery voltage • LED to indicate bumper has power • Power to bumper requires wiring to power distribution module
Pneumatics Bumper • Reverse-battery protection • 8 Outputs to directly drive solenoids • Mounts to NI 9472 Digital Module • Means you don’t have to use Spikes to drive solenoids anymore • Save weight, space and money • LED to indicate bumper has power • Power to bumper requires wiring to power distribution module
Driver Station • 4 USB connections for joysticks of all kinds • 2 Ethernet jacks • Network connection (competition) • Switched connection for laptop • 4 Analog Inputs on 3-pin connectors • 8 Digital Inputs on 3-pin connectors • 8 Digital Outputs on 3-pin connectors • Wall wart for power (always required) • Upgradeable via USB stick
Wireless Interface – 802.11 • Radio on the robot is 802.11 gaming adapter • Wireless bridge: cRIO and Access Point • You will assign fixed IP addresses to your components, using team number • Use an AP during build season, connect to the wired network at the competition • Field will use 5 GHz band (802.11 a) to avoid overlap and interference
Ethernet Camera – Axis 206 • Streaming color video • Connects to RJ45 on cRIO • Plays video on laptop • Axis application • Labview video viewer
Jaguar Motor Controller • Limit Switch Inputs • Controller Area Network Bus • It’s bigger, but ….. • See Chief Delphi for more details and blogs
Interesting Things to Know But, don’t worry … .documentation is coming
Working the Wago • Use the Wago tool provided • Take care to insert directly at a fixed angle, pressing straight in • Do not pry. The goal is to open the spring by pressing in the screwdriver, not by prying Yes ! NO ! End View
Living in Harmony with 802.11 • A couple of simple configs on the Linksys AP will save you trouble • Ways to set up your development network so it runs your robot, and gives you access to network drives/printers • Stay away from 802.11n settings on AP • Learn how to set static IP addresses on your PC