
Soft Robotics
E N D
Presentation Transcript
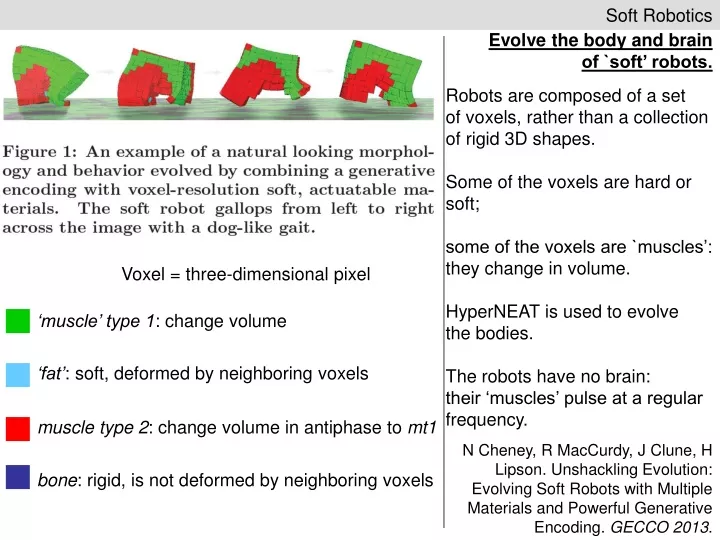
Soft Robotics Evolve the body and brain of `soft’ robots. Robots are composed of a set of voxels, rather than a collection of rigid 3D shapes. Some of the voxels are hard or soft; some of the voxels are `muscles’: they change in volume. HyperNEAT is used to evolve the bodies. The robots have no brain: their ‘muscles’ pulse at a regular frequency. Voxel = three-dimensional pixel ‘muscle’ type 1: change volume ‘fat’: soft, deformed by neighboring voxels muscle type 2: change volume in antiphase to mt1 N Cheney, R MacCurdy, J Clune, H Lipson. Unshackling Evolution: Evolving Soft Robots with Multiple Materials and Powerful Generative Encoding. GECCO 2013. bone: rigid, is not deformed by neighboring voxels
Soft Robotics Can create more complex robots than `rigid’ ones Why little progress in 19 years? Evolution has few options if asked to put together a few shapes; Much more design freedom for large number of voxels with different material properties N Cheney, R MacCurdy, J Clune, H Lipson. Unshackling Evolution: Evolving Soft Robots with Multiple Materials and Powerful Generative Encoding. GECCO 2013.
Soft Robotics Why use HyperNEAT? X Y Z X Y Robots are composed of a set of voxels, rather than a collection of rigid 3D shapes. Voxels have different material properties (e.g. hard/soft) Would like to have regular 3D patterns of different kinds of voxels throughout the robot. Deposit plastic droplet (y/n) Greyscale of pixelxy N Cheney, R MacCurdy, J Clune, H Lipson. Unshackling Evolution: Evolving Soft Robots with Multiple Materials and Powerful Generative Encoding. GECCO 2013.
Soft Robotics Evolve the body and brain of `soft’ robots. • Take a CPPN. • Feed in the x, y, z position of each • pixel within a cube. Also d, its • position from the cube’s center. • One binary output value: • pixel present/absent • four continuous output values: • pixel type 1, … pixel type 4 • If pixel present, place pixel type • with maximum value. • If multiple patches, take the one • closest to the center. ) max( N Cheney, R MacCurdy, J Clune, H Lipson. Unshackling Evolution: Evolving Soft Robots with Multiple Materials and Powerful Generative Encoding. GECCO 2013.
Soft Robotics Physical soft robots. Physical robot is composed of two voxel types: red and white. Robot placed in a pressure chamber. Q: How does the robot move? N Cheney, R MacCurdy, J Clune, H Lipson. Unshackling Evolution: Evolving Soft Robots with Multiple Materials and Powerful Generative Encoding. GECCO 2013.
Soft Robotics Re-query CPPN at higher resolution Soft robots of variable resolution. Genotype = CPPN (Compositional Pattern-Producing Network) Can produce multiple phenotypes (robots) at different resolutions. Simply use smaller voxels and requery the CPPN. (below is from lecture 23) N Cheney, R MacCurdy, J Clune, H Lipson. Unshackling Evolution: Evolving Soft Robots with Multiple Materials and Powerful Generative Encoding. GECCO 2013.
Soft Robotics Compare HyperNEAT to a direct encoding Q: How would you define a genotype to directly encode a 10x10x10=103 voxel soft robot composed of four different voxel types? How many `genes’ would there be? N Cheney, R MacCurdy, J Clune, H Lipson. Unshackling Evolution: Evolving Soft Robots with Multiple Materials and Powerful Generative Encoding. GECCO 2013.
Soft Robotics Evolve the body and brain of `soft’ robots. Generative encoding produces regular patterns of the same voxel type. “In the direct encoding, each voxel works independently from—and often at odds with—its neighboring voxels, preventing coordinated behaviors.” (section 4.1) N Cheney, R MacCurdy, J Clune, H Lipson. Unshackling Evolution: Evolving Soft Robots with Multiple Materials and Powerful Generative Encoding. GECCO 2013.
Soft Robotics How different fitness functions affect evolution. FitnessFn1: displacement (d) Fitness functions 2 through 4: add a penalty term of the form F = d * ( 1 - penalty/maxPenalty ) FF2: d * (1–usedVoxels/1000) FF3: d * (1 – connsBetVoxels/ maxConnsBetVoxels ) FF4: d * (1–usedActVoxels/1000 ) N Cheney, R MacCurdy, J Clune, H Lipson. Unshackling Evolution: Evolving Soft Robots with Multiple Materials and Powerful Generative Encoding. GECCO 2013.
Soft Robotics How different fitness functions affect the robot phenotypes. FitnessFn1: displacement (d) Fitness functions 2 through 4: add a penalty term of the form F = d * ( 1 - penalty/maxPenalty ) FF2: d * (1–usedVoxels/1000) FF3: d * (1 – connsBetVoxels/ maxConnsBetVoxels ) FF4: d * (1–usedActVoxels/1000 ) N Cheney, R MacCurdy, J Clune, H Lipson. Unshackling Evolution: Evolving Soft Robots with Multiple Materials and Powerful Generative Encoding. GECCO 2013.
Soft Robotics Evolution of biologically-similar phenotypes. N Cheney, R MacCurdy, J Clune, H Lipson. Unshackling Evolution: Evolving Soft Robots with Multiple Materials and Powerful Generative Encoding. GECCO 2013.
Soft Robotics ‘muscle’ type 1: change volume ‘fat’: soft, deformed by neighboring voxels muscle type 2: change volume in antiphase to mt1 bone: rigid, is not deformed by neighboring voxels Do the different voxel types matter? 35 evolutionary runs… …with all four voxel types. 35 evolutionary runs… …with red, blue and green voxels. 35 evolutionary runs… …with just red and blue voxels. 35 evolutionary runs… …with just red voxels. N Cheney, R MacCurdy, J Clune, H Lipson. Unshackling Evolution: Evolving Soft Robots with Multiple Materials and Powerful Generative Encoding. GECCO 2013.
Soft Robotics Getting beyond locomotion over flat ground. How to get to object manipulation? Start by ‘grabbing’ obstacles on the ground and pushing or pulling yourself forward.. N Cheney, R MacCurdy, J Clune, H Lipson. Unshackling Evolution: Evolving Soft Robots with Multiple Materials and Powerful Generative Encoding. GECCO 2013.





















