Time Division CSMA Simulation Analysis
Explore CSMA protocol in slotted, nonpersistent mode with mini time slots and collision resolution. Analyze throughput, collision resolution, and noise effects in a noisy channel.

Time Division CSMA Simulation Analysis
E N D
Presentation Transcript
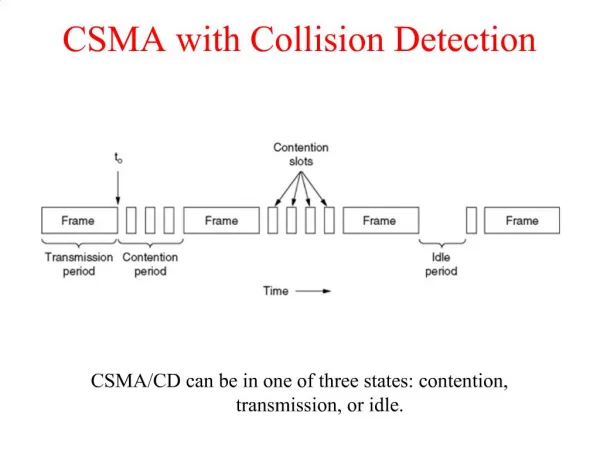
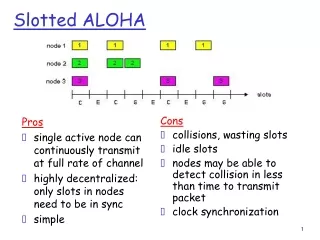
Slotted Nonpersistent CSMA • Timeline divided into time slots, called mini slot, with length equal to maximum propagation delay t. • Before attempting transmission, the user waits for the beginning of the next slot, and senses whether the channel is idle. If idle, he sends the packet for T time slots. • If the channel is busy, the packet is rescheduled to some randomly chosen time in the future.
Throughput analysis • Idle period = 1 => arrival in first idle slot • Idle period = 2 => no arrival in first and arrival in second …
Idle period • Following the above reasoning we get: • Giving us:
Busy Period • Both successful and unsuccessful transmissions last T+t • A busy period will contain k transmission periods if there is at least one arrival in the last mini-slot of each of the first k-1 transmission periods, and no arrival in the last mini-slot of the kth transmission period: • And:
Useful time • During the busy period, the number of transmission periods is: • When a transmission period is useful it carries information for T seconds • The useful part of the busy-idle cycle is then: Where Psuc denotes the success probability
Success probability • We divide by the probability of “some arrivals” because we know there was at least one arrival, since a transmission period has been initiated
BTP collision resolution • Given a MA channel with Trenary Feedback running BTP for collision resolution. • A node perform the following algorithm upon waking up: • If collision, wait for resolution and then transmit • Otherwise (if quiet or success), broadcast in the next time slot. • At time t, n nodes collided. At time T>t a new node woke up wishing to send a packet. Which of the following is true? • The node will transmit successfully only after all n nodes have successfully transmitted • The node will transmit during the collision resolution, and the result will be as if the node had collided with the n nodes in the first place • Either 1. or 2. depending on the place in the of the slot in the virtual tree • Either 1. or 2. according to the type of slot the node sensed • All the above answers are wrong
BTP in a noisy channel • Consider a MA channel where BTP is applied and noise is present. The impact of noise is that there is a probability p1 that a slot which contains a single transmission is interpreted as a collision. • How will the CRIs (Collision Resolution Intervals) change?
נפתור • How will the optimal probability p change: