Microcontroladores PIC
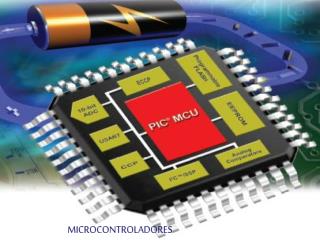
Microcontroladores PIC. Arquitectura de los microcontroladores PIC. Los PIC siguen la arquitectura Hardvard (Mark I) memoria de datos separada de la memoria de programas dos tamaños de palabra: Palabra de datos Palabra de instrucción Conjunto reducido de instrucciones (RISC).


Microcontroladores PIC
E N D
Presentation Transcript
Arquitectura de los microcontroladores PIC • Los PIC siguen la arquitectura Hardvard (Mark I) • memoria de datos separada de la memoria de programas • dos tamaños de palabra: • Palabra de datos • Palabra de instrucción • Conjunto reducido de instrucciones (RISC)
Arquitectura Harvard • Palabra de instrucción larga: • formato que permite incorporar en una única instrucción todos los campos necesarios (importante: suficiente espacio para los bits de dirección) • Una única palabra por instrucción. • Decodificación más sencilla. (un único ciclo) • Pipeline de ejecución.(2 etapas) • Solapa la búsqueda de instrucción con la ejecución • Salvo en las instrucciones de salto. • Conjunto de instrucciones reducido. • Arquitectura de registros. Conjunto de instrucciones ortogonal.
Esquema de reloj/ciclo de instrucción Internamente, el reloj de entrada es dividido por cuatro. Un ciclo de instrucción equivale a cuatro periodos del reloj de entrada. En Q1, se lee la siguiente instrucción y en Q4 es almacenada en el registro En el siguiente ciclo es ejecutada.
ejecución La importancia de conocer el ciclo de ejecuciónde instrucciones en un micro controlador estriba en que en ocasiones es necesario calcular de forma precisa el tiempo de ejecución de los bucles para actuar en tiempo real
Familia de microcontroladores de 8 bits • Entre los productos que ofrece Microchip está la familia de microcontroladores de 8 bits • Se refiere al tamaño de la palabra de datos que maneja • Esta familia está subcategorizada por el tamaño de palabra de instrucción, que se corresponde con las capacidades ofrecidas por el microcontrolador correspondiente. • Gama Baja: palabra de instrucción 12 bits • Gama Media: Palabra de instrucción 14 bits • Gama Alta: Palabra de instrucción 16 bits
Gama baja • La componen los modelos de las familias • PIC10F (empaquetado de 6 pines) • Algunos elementos de las familias PIC12 • (empaquetado de 8 pines) • Algunos elementos PIC16F5X • (empaquetados de 14, 18, 20 y 28 pines) • Palabra de instrucción de 12 bits • Reducido número de pines y pequeña dimensión • Memoria flash programable • Reducido coste y facilidad de uso
Gama Media • Palabra de instrucción de 14 bits. • Familias PIC12 • Familias PIC16 • Mayor número de pines en los empaquetados.(8-64) • Mayor rango de voltajes operativos. 2.0-5.5v • Manejo de interrupciones • Pila de programas más amplia • 8 niveles • Canales conversores A/D y memoria EEPROM de datos • Gestión de diversos protocolos de comunicación : • USB, SPI, I2C, USART. • Conexión inmediata a LCD. • Rendimiento en torno a los 5MIPS
Gama Alta • Tamaño de palabra de 16 bits • PIC18C • 10MIPS • Multiplicador hardware • Aumento del tamaño del stack • (32 niveles) • Aumento del número de fuentes de interrupción • Empaquetado entre 18 y 80 pines. • Periféricos avanzados de comunicación y protocolos • CAN, USB, ZigBee, TCP/IP
Tecnología nanoWatt • Los avances en micro controladores se centran en la reducción de consumo • En este sentido se dota a los chip de la capacidad de seleccionar la fuente del reloj (hasta 9 posibles opciones) • 4 modos que usan un cristal oscilador • 2 modos que usan un reloj externo • 2 modos que usan un oscilador RC externo • Oscilador interno que proporciona múltiples frecuencias (programables)
Consumo de potencia. • Dos componentes: consumo estático y consumo dinámico. • Consumo dinámico, derivado de la conmutación de los dispositivos lógicos. • Principalmente influido por la frecuencia de funcionamiento, aunque también el voltaje y la temperatura ambiente tienen influencia en este consumo. • El usuario puede influir en este consumo únicamente seleccionando la frecuencia de funcionamiento. • Consumo estático. Es el consumo cuando el reloj principal se deshabilita. • El consumo se debe principalmente al leakage de los dispositivos y a la corriente consumida por los supervisores de voltaje. Depende principalmente del voltaje de alimentación y de la temperatura ambiente. • El usuario principalmente influye al seleccionar el voltaje de alimentación. Hay dispositivos que admiten fuente separada de voltaje, lo que permite al usuario incorporar en sus aplicaciones una selección dinámica de voltaje.
Modos de funcionamiento • Deep Sleep mode: Es el modo de menos consumo fuera de estar completamente apagado. • Se alcanza eliminando la alimentación de la mayoría de los componentes internos • Número limitado de fuentes desde las cuales pueda sacarse al dispositivo de este estado • el despertar de un dispositivo en DeepSleep implica el reset del dispositivo • Aunque es posible determinar el estado desde el que se resetea para retomar un flujo de ejecución. • La forma de entrar en el Deep Sleep Mode hay que consultarla en la documentación del microcontrolador
Modos de funcionamiento • Sleep Mode: El reloj principal y la mayoría de los periféricos son apagados llevando al dispositivo a un estado de bajo consumo. • Se conserva el status del dispositivo. • Se entra en Sleep Mode ejecutando la instrucción Sleep. Al retornar de este estado se continúa la ejecución por la instrucción que sigue al Sleep
Modos de funcionamiento • Idle y Doze Mode: Son modos de reducción de consumo dinámicos. Permiten mantener el funcionamiento de mayor número de periféricos que los modos anteriores. • El consumo que se ahorra se debe a que la Cpu se detiene. • En el modo Idle, se le bloquea el reloj principal a la CPU, pero no a los periféricos, de manera que estos puedan seguir funcionando de forma autónoma. • En el modo Doze (disponible sólo en algunos periféricos) el reloj de la CPU sigue funcionando, pero se le puede reducir en frecuencia por un factor programable.
Modos de funcionamiento • Clock Switching: Algunos microcontroladores ofrecen la posibilidad de alternar entre diferentes relojes de forma dinámica. • El consumo se reduce cuando disminuye la frecuencia de reloj, por lo que adaptando la frecuencia del reloj a las situaciones permite un ahorro en el consumo.
Familia de 8 bits Enlace a la página de Microchip Toda la información procede de documentos de Microchip Además Microcontroladores PIC. Diseño práctico de aplicaciones 2ª parte Agulo Usategui/ Romero Yesa/Angulo Martínez McGrawHill