Download

1 / 1
10 likes | 566 Views
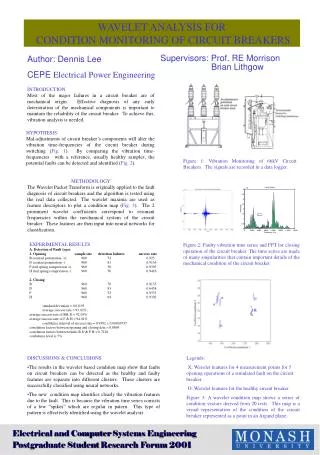
Stereo Vision Data i Local map Li Relocalisation & Mapping Odometry i -1 i Global map Gi Global map Gi - 1 2 1 1 1 2 1 G 1 2 1 1 1 2 2 2 2 2 3 4 4 5 6 7 5 5 5 S 7 Depth from camera baseline (not scaled) 6 6 6 6 7

E N D
Stereo Vision Data i Local map Li Relocalisation & Mapping Odometry i -1 i Global map Gi Global map Gi -1 2 1 1 1 2 1 G 1 2 1 1 1 2 2 2 2 2 3 4 4 5 6 7 5 5 5 S 7 Depth from camera baseline (not scaled) 6 6 6 6 7 STEREO VISION BASED MOBILE ROBOT NAVIGATION IN ROUGH TERRAIN Supervisor: Professor Ray. A. Jarvis Author: Sardjono Trihatmo Statement of the problem A mobile robot needs to attain a given goal position autonomously in rough terrain. The environment is unknown and possibly unstructured. The robot must find a feasible path to the destination point and avoid any collision with obstacles using a stereo vision system and natural landmarks. Environmental Representation The cell based model is used to represent the environment. This model is characterised by dividing the environment into smaller cells. Cells are either occupied or not. The accuracy of this model can be increased by reducing the cell size. Figure 3. Oobstacles representation using the cell based model. Localisation and Mapping Localisation is a sufficiently estimation of the current position of the mobile robot. Mapping is a sufficiently approximate map of the navigation area. The research is focused on the problem of simultaneous localisation and mapping. That is, the relocation of the mobile robot at each step along its path by using current and previous information about the environment. This method is very useful if a map is not given. The robot generates the map using the sensor data and estimates its position from this generated map. Figure 1. The mobile robot ROBUTER and the arm RTX used in the research. The cameras are installed on the wrist of the arm. Robot Perception The robot uses a stereo vision system as an external sensor to perceive the environment that is possibly unpredictable. The sensor information is used to model the environment and perform localisation. The stereo vision system delivers discrete disparity values that are inverse to distance. An appropriate calibration is needed to get reliable data. Figure 4. Simultaneous Localisation and Mapping Path Planning The research implements the Distance Transform [1] path planning method. This method was devised specifically for the cell based environmental model. The main idea is to number the cells. Starting from the goal position, the cells are numbered, with each cell getting the minimum number of any of its neighbours, plus one and itself. Then, for the robot to move from any start point, it needs to make the steepest descent traversal to achieve the shortest possible path. Figure 5. The Distance Transform path planning G: Goal position S: Start position a. b. Figure 2. The real world (a) is converted to the disparity image (b). The brighter image indicates that it is closer to the cameras. The depth (c) correspondence with the maximum disparity in each column of the disparity image. Obstacle Reference: [1] R. A. Jarvis. Collision free trajectory planning using distance transform. In Proc. National Conference and Exhibition on Robotics, Melbourne, August 1984. Camera baseline c. Electrical and Computer Systems Engineering Postgraduate Student Research Forum 2001