Realizability of System Interface Specifications
270 likes | 409 Views
Realizability of System Interface Specifications. Manfred Broy. Motivation. State machines with input and output (generalized Mealy machines) provide a concept of implementation of discrete systems Behavioral abstraction by the concept of interface behavior

Realizability of System Interface Specifications
E N D
Presentation Transcript
Realizability of System Interface Specifications Manfred Broy
Motivation • State machines with input and output (generalized Mealy machines) provide a concept of implementation of discrete systems • Behavioral abstraction by the concept of interface behavior • Interface abstraction for state machines with input and output • Interface assertions • Specification of interface behavior • Realizability as a condition that interface assertions have implementations by state machines • Nonrealizable specifications • Safety and realizability • Liveness and realizability
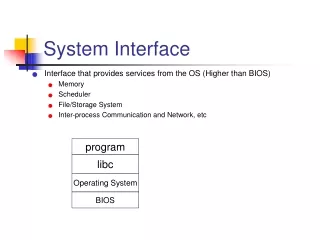
Types and channels • A type is (for our purpose) a set of messages (signals, events); Let M be the universe of all messages of all types • A channel is a name for a communication link in a system Typed channel setC: • a set of names in C • a function typeC : C Type where Type is the set of types; • A snapshot valuation for a channel set C is a mapping v:C M where v(c) is of type type(c) for all c C; by Val[C] we denote the set of all channel snapshot valuations
The system model: static interface The static (syntactic) interface of a system is given by • a set I of typed input channels • a set O of typed output channels The static interface then is denoted by I »O
Streams and Channel Histories • a streams of type T is an infinite sequence of elements of type T represented by the mapping s: IN+ T where IN+ = IN \ {0} STREAM denotes the set of all streams • A channel historyz for the typed channel set C is a mapping that associates a stream with every channel in C z: C STREAM By IH[C] we denote the set of all histories Notation: xt prefix of length t of the history or stream x
State Machines with Input and Output A state machine(, ) with input and output for static interface I » O is given by • a state space, which represents a set of states, • a set of initial states • a state transition function : ( Val[I]) ( Val[O]) For each • state and each • valuation Val[I]of the input channels in I by messages we get by (', ) (, ) a successor state ' and a valuation Val[O]of the output channels consisting of the messages produced by the state transition. Such state machines are also called Mealy machines.
Classes of state machines A state machine (, ) is called • total, if for all states and all inputs IH[I] the sets (, ) and are not empty; otherwise the machine (, ) is called partial. • deterministic, if and (, ) are sets with at most one element for all states and input Val[I]. • bounded choice, if and (, ) are finite sets for all states and input Val[I]
Computations of State Machines • a stream x of input : x1 , x2, … • a stream y of output : y1 , y2, … • a stream s of states : 0 , 1, … • A computation generated state machine (, ) on input history x IH[I] and the initial state 0 is defined choosing step by step (i+1, yi+1) (i, xi+1) it computes the output history y IH[O] that way. • Comp(, ) denotes the set of pairs (x, y) where y IH[O] is an output history computed by state machine (, ) on input history x IH[I] and initial state 0
Interface function and interface abstraction For syntactic interface I » O an interface function is given by F: IH[I] (IH[O]) A state machine (, ) defines an interface abstraction F(, ): IH[I] (IH[O]) F(, )(x) = {y: (x, y) Comp(, )}
Interface assertions For static interface I»O a logical formula R which contains the input and output channels in I and O as free variables for streams is called interface assertion Interface assertion R defines a predicate R(x, y) on histories x and y and an associated interface function F: y F(y) R(x, y) A state machine (, ) is correct forinterface assertion Rif (x, y) Comp(, ) R(x, y)
A Specification Example System Fresh delivers always the newest value of x Types • Write = {d Data} • Get = {get, “-”} • Val = {d Data} The logical specification: t: z(t) = get y(t+1) = last(x, t) z(t) = “-” y(t+1) = “-” where: last(x, 0) = d0 last(x, t+1) = if x(t) “-” then x(t) else last(x, t) fi Note that this system is very difficult to describe with shared variables and access to shared variables by assignments.
Causality A function F: IH[I] (IH[O]) that fulfils the proposition (for all t, x, y) xt = x’t {yt+k: y F(x)} = yt+k: y F(x’)} is called k-delayed. • 0-delayed functions are called causal • 1-delayed functions are called strongly causal A causal function is also called an interfacebehaviour.
Definition: Realizability Interface assertion R and associated behavior F and is called realizable, if there exists a (strongly) causal total function f: IH[I] IH[O] such that R(x, f(x)) x IH[I] : f(x) F(x) Then • f is called a (strong)realization of F (and R) • yF(x) is called realizable if there exists a realization f with y = f(x) • F (and R) are called fully realizable if every yF(x) is realizable • By [[F]] we denote the set of all realizations of F
Example: Nonrealizable causal interface assertion Consider the interface specification R(x, y) = [x ≠ y] Facts: • the behavior associated with R is strongly causal • R is a liveness property • R is not realizable
Realizability and state machines Theorem Interface assertion R and associated behavior F and are realizable, iff there exists a total deterministic state machine that is correct for R.
Theorem: Realizability For each interface specification R: there exist a state machine that is correct for R iff Rrealizable.
Theorems on interface abstraction An interface abstraction F(, )of a total Mealy machine (, ) is always • causal • strongly causal, if (, ) is a Moore machine • fully realizable.
Realizability of interface specification R Questions: • Is causality a sufficient condition for realizability • Under which conditions is R realizable • Realizability of contracts (assumption/commitment specifications) • The role of safety and liveness of R for realizability
Causality and realizability Theorem: An interface assertion R is realizable iff there exist a realizable causal interface assertion R’ with R’ R
Conditions for realizability Theorem: If the formula x: y: R(x, y) does not holds, then the causal interface specification R is not realizable
Notation Let P be a predicate about histories. We write P(xt) for the formula x’: xt = x’t P(x’)
Characterizing Safety and Liveness An interface assertion R is a safety property if for all x and y: R(x, y) t: R(xt, yt) Interface assertion R is a liveness property if for all x and y t: R(xt, yt)
Safety Realizability Theorem: A causal safety interface specification R is fully realizable iff the formula x: y: R(x, y) holds.
Bounded choice and safety Theorem If a total state machine (, ) is bounded choice then its associated interface assertion (x, y) Comp(, ) is a safety property.
Liveness requires unbounded choice Theorem Every fully realizable liveness property can be implemented by an unbounded choice state machine.
Example. Nonrealizable Specification Consider a system • with only one input channel x and • one output channel y both carrying Boolean messages with specification R(x, y) = [ (true#x < true#y = ) (true#x = true#y < ) ] Here true#x denotes the number of messages in stream x. Both assertions are liveness properties and so is predicate R. Obviously, x: y: R(x, y) Note the assertion true#x < ∞ as well as its negation true#x = ∞ are both liveness conditions.
Conclusion • Causality and realizability are mandatory properties for interface specification • There is a difference between logical inconsistency and nonrealizability • Safety is simple for realizability • Liveness is tricky for realizability • Realizability and causality provide healthy conditions for contracts