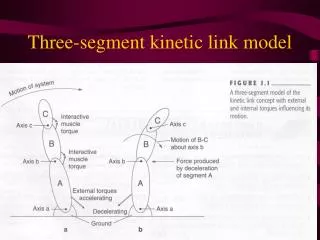
Link Segment Model
Link Segment Model. Joint Reaction Forces Muscle Moments Joint Power. Newton’s Laws of Motion. Law of Inertia: A body at rest stays at rest and a body in motion stays in motion unless acted upon by a force or torque.

Link Segment Model
E N D
Presentation Transcript
Link Segment Model Joint Reaction Forces Muscle Moments Joint Power
Newton’s Laws of Motion • Law of Inertia: A body at rest stays at rest and a body in motion stays in motion unless acted upon by a force or torque. • Law of Acceleration: The acceleration a body experiences is directly proportional to the force or torque, inversely proportional to the mass or moment of inertia and occurs in the direction of the force or torque. • Law of Reaction: For every action there is an opposite reaction.
Newton’s First Law: Law of Inertia Law of Inertia: A body at rest stays at rest and a body in motion stays in motion unless acted upon by a force or torque. Mass is the measure of an object’s resistance to linear change. Moment of inertia is the measure of an object’s resistance to angular change. ΣF = m a ΣT = Iα To solve for forces and torques, we need both mass and moment of inertia.
Moment of Inertia (I) ICG= 3.5 kg·m2 • The Moment of Inertia (I) represents an objects resistance to angular change about some axis. • Moment of inertia is a sum of the product of mass times the squared distance of the mass about the axis. • When body parts are moved closer to the axis of rotation the moment of inertia (resistance to spin) is reduced. ICG= 15 kg·m2 ICG= 6.5 kg·m2 ICG= 83 kg·m2
Link Segment Model Assumptions • Each segment has a fixed mass located at its center of mass • The joints are considered as hinge joints • The moment of inertia is fixed during movement • The length of each segment is constant
Input Information to Solve for Joint Forces and Torques • Mass & moment of inertia of each segment. • Location of each segments Center of Mass (CM). • Position, velocity, acceleration of each segments CM (x, y, Vx, Vy, Ax, Ay). • Angular position, velocity, acceleration about each segments CM (Θ, ω, α). • External forces for all contact points. • Center of pressure or location of external forces acting on the body. Center of Pressure gives the location of external forces acting on the body.
Inverse Dynamics: Finding Forces & Torques from Position Data. [working backward to solve for forces & torques]