PCM
PCM. Comunicaciones Eléctricas Ing. Verónica M. Miró 2011. Pulse Code Modulation - PCM. Modulación por pulsos codificados Forma básica de modulación digital de pulsos

PCM
E N D
Presentation Transcript
PCM Comunicaciones Eléctricas Ing. Verónica M. Miró 2011
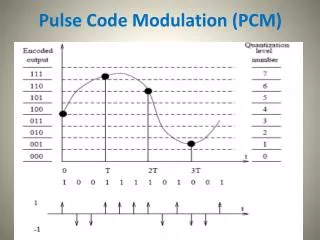
Pulse Code Modulation - PCM • Modulación por pulsos codificados • Forma básica de modulación digital de pulsos • Mensaje representado por una secuencia de pulsos codificados (representación de la señal mensaje en forma discreta en tiempo y amplitud) • Operaciones básicas: • Muestreo (S) • Cuantización (Q) • Codificación (E)
Pulse Code Modulation - PCM Cada muestra que entra al codificador se cuantifica en un determinado nivel de entre un conjunto finito de niveles de reconstrucción. Cada uno de estos niveles se hace corresponder con una secuencia de dígitos binarios, y esto es lo que se envía al receptor. Se pueden usar distintos criterios para llevar a cabo la cuantificación, siendo el más usado el de la cuantificación logarítmica.
Pulse Code Modulation - PCM • El filtro es para prevenir el aliasing la señal mensaje. • El Q (Quantizer) y el E (Encoder) forman el conversor A/D
Pulse Code Modulation - PCM • En el receptor las operaciones básicas son la regeneración de la señal dañada, decodificación y reconstrucción de un tren de muestras cuantizadas. • Se utiliza masivamente para comunicaciones telefónicas
Muestreo (S) - PCM • El filtro pasabajos limita la frecuencia de la señal analógica de entrada. • El bloque muestreador, toma muestras, en forma periódica, de la señal analógica y la convierte en una señal PAM de varios niveles (sample and hold). Secuencia de pulsos con amplitudes variables acordes con el valor de la muestra
Cuantificación (Q) – PCM • La versión muestreada de una señal es luego cuantificada, nueva versión discreta en amplitud y tiempo. • En comunicaciones telefónicas se prefiere utilizar una separación variable entre los niveles de representación • Ej.: El rango de voltaje de una señal de voz están en el orden de 1000 a 1
Cuantificación (Q) – PCM • Cuantificador no uniforme: A medida que la señal I/O aumenta, aumenta también el salto/cuanto. • Saltos grandes, excursiones de la señal en rangos grandes de amplitud, ocurren en forma no frecuente. • Saltos pequeños, necesitan mayor cobertura a expensas de los saltos grandes
Cuantificación (Q) – PCM • Cuantificador no uniforme es equivalente a hacer pasar la señal por un compresor y luego aplicar la señal comprimida a un cuantificador uniforme. • Ley de compresión m • m y v son voltajes normalizados de entrada y salida. • m es una ctte. >0
Cuantificación (Q) – PCM • Para un dado valor de m, la recíproca de la pendiente de la curva de compresión que define los saltos cuánticos, está dada por la derivada deImI, respecto de IvI
Cuantificación (Q) – PCM • La ley m es aproximadamente logarítmica para mImI>>1 • En USA y Japón se utiliza compresión/expansión de ley m. • Los primeros sistemas de transmisión digital de Bell Systems utilizaban PCM de 7 bits con m = 100, los más recientes utilizan PCM de 8 bits con m = 255
Cuantificación (Q) – PCM • Otra ley de compresión muy utilizada en la práctica es la llamada ley A definida por
Cuantificación (Q) – PCM • El caso A = 1 corresponde a cuantificación uniforme. • La recíproca de la pendiente de la curva de compresión está dada por la derivada de ImI respecto de IvI
Cuantificación (Q) – PCM • En Europa el ITU ha establecido el uso del compresor / expansor ley A para aproximar el proceso logarítmico. • El comportamiento es inferior a ley m para señales pequeñas (ruido de canal inactivo). • La ley A es de uso en Europa, Sudamérica y en todas las rutas internacionales, debiendo los países que usan ley m adaptarse para las mismas. (A = 87.6)
Cuantificación (Q) – PCM • Para restaurar las muestras de la señal a su nivel correcto, se deberá utilizar un dispositivo en el Rx con una característica complementaria al compresor; un expansor. • Idealmente las leyes de compresión / expansión son complementarias excepto por el efecto de la cuantificación, la salida del expansor deberá ser igual a la entrada del compresor: Ambos efectos COMPANSIÓN
Cuantificación (Q) – PCM • Tanto para ley A / ley m, el rango dinámico del compansor mejora incrementando los valores de A / m. • La SNR para bajas señales se incrementa a expensas de la SNR de las señales de gran amplitud. • Situación de compromiso para la elección de los valores de A / m (valores típicos A = 87.6 y m = 255)
Cuantificación (Q) – PCM • La circuitería actual provee una réplica aproximada por partes a la curva deseada. • Se utiliza una suficiente cantidad de segmentos lineales, la aproximación se acerca bastante a la curva real de compresión.
Codificación (E) – PCM • Ventajas: • Señales más robustas al ruido, interferencia y otros daños que sufre por el canal. • Código: Sucesión ó arreglo particular de eventos discretos = SIMBOLO • Palabra código: Arreglo único de símbolos para representar un valor único. • Código binario: 2 valores diferentes, 0 y 1 • Código ternario: 3 valores diferentes para representar
Codificación (E) – PCM • Código binario • Soportan alto nivel de ruido • Muy sencillo de regenerar • Cada palabra consiste en R bits (R = número de bits por muestra) • Números diferentes: 2R • Representación ordinal del número, más sencillo, en correspondencia con el binario Ej.: 15 23+22+21+20 1111
Códigos de línea • Son utilizados para representar eléctricamente una tira de datos binaria • Los símbolos 1 y 0 son equiprobables • La potencia promedio está normalizada a la unidad • La frecuencia está normalizada con respecto a la tasa de bits Rb = 1/Tb
Códigos de línea • Unipolar no retorno a cero (NRZ) • Polar no retorno a cero (NRZ) • Unipolar retorno a cero (RZ) • Bipolar retorno a cero (RZ): AMI • Fase desplazada ó código Manchester
Códigos de líneaUnipolar NRZ • 1: Transmite un pulso de amplitud A para la duración del símbolo • 0: No hay transmisión • Más conocido como ON – OFF • Desperdicio de energía debido a la transmisión de DC level • El espectro de la señal transmitida no es cero en f = 0
Códigos de líneaPolar NRZ • 1: Transmite un pulso de amplitud A para la duración del símbolo • 0 : Transmite un pulso de amplitud -A para la duración del símbolo • Fácil de generar • El espectro de potencia de la señal es grande cerca de f = 0
Códigos de líneaUnipolar RZ • 1: Representado por un pulso rectangular de amplitud A y duración la mitad del símbolo • 0 : Ausencia de pulso • Presencia de funciones d en f=0; ±1/Tb en el espectro de la señal transmitida que puede ser usada para recuperación de clock en el receptor • Requiere 3dB adicionales de potencia que el bipolar RZ para tener la misma Pe de símbolo
Códigos de líneaBipolar RZ • 1: Representado por dos niveles de amplitud, (-A, A), donde cada uno utiliza la mitad del ancho de bit. • 0 : Ausencia de pulso • El espectro de potencia no tiene componente de DC y tiene componentes de baja frecuencia de muy bajo bajor, cuando los símbolos 1 y 0 tienen igual probabilidad • AMI (Alternate Mark Inversion)
Códigos de línea – HDB3 • Supera la desventaja del código AMI: una larga cadena de ceros = pérdida de sincronización. • Reemplaza cadenas de 4 ceros con secuencias que contienen 1 ó 2 pulsos
Códigos de línea – HDB3 CÓDIGO AMI B: Relleno V: Violación CÓDIGO HDB3
Códigos de líneaFase Desplazada - Manchester • 1: Representado un pulso positivo (+A) y un pulso negativo (-A), donde uno utiliza la mitad del ancho de bit. • 0 : Representado un pulso negativo (-A) y un pulso positivo (+A). • El espectro de potencia no tiene componente de DC y tiene insignificantes componentes de baja frecuencia.
CODIFICACIÓN DIFERENCIAL • Método de codificación por trancisiones de la señal • 0 : Transcisión • 1 : No trancisión
REGENERACIÓN Sistema PCM: tiene facilidad de controlar los efectos de la distorsión y el ruido producidos durante la transmisión de la señal PCM por el canal. • Repetidores: Reconstrucción de señal: Facilidad de reconstrucción de la señal PCM • Repetidores regenerativos
REGENERACIÓN • Ecualizador: Compensa los efectos de la distorsión de fase y amplitud del pulso recibido producido por las características no ideales del canal • Clock: Provee un tren de pulsos periódicos derivado de los pulsos recibidos, para muestrear los pulsos ecualizados en los instantes de tiempo donde SNR es máxima. • Dispositivo de Decisión: Cada muestra extraída es comparada con un umbral. En cada intervalo de bit se toma una decisión por un 1 ó por un 0 dependiendo si el umbral es excedido ó no.
REGENERACIÓN • Resultados: • La acumulación de distorsión y ruido es completamente removida, si ambos efectos no son demasiado importantes como para causar un error en el proceso de decisión. • Idealmente, excepto por el retardo, la señal regenerada es exactamente la misma que la señal originalmente transmitida. • Errores en la regeneración: • Insalvable presencia de ruido en el canal y la interferencia, causan decisiones erradas. • Desviación del espaciamiento entre los pulsos recibidos, se produce jitter en la posición de los pulsos regenerados. (Jitter: falta de uniformidad en la velocidad de muestreo, aleatorio)
DECODIFICACIÓN • Antes de ingresar al decodificador, la señal que sale del canal debe ser regenerada. • Los pulsos limpios son reagrupados en palabras código y decodificados en una serie de pulsos PAM cuantificados. • Decodificación: Suma lineal de todos los pulsos de la palabra código, pesados de acuerdo a la posición que ocupa en el símbolo, con R:bits por muestra.
FILTRADO • FILTRO PASABAJOS: Recupera la señal mensaje pasando la salida del decodificador por el filtro de reconstrucción, con frecuencia de corte igual al ancho de banda del mensaje W. • Suponiendo que no hay ruido durante la transmisión, la señal recuperada es no ruidosa con excepción de la distorsión lineal introducida por el proceso de la cuantificación.
CONSIDERACIONES DE RUIDO – SISTEMA PCM • La performance de un sistema PCM está influenciado por dos fuentes de ruido: • Ruido del canal, introducido en cualquier lugar entre la salida del Tx y la entrada del Rx. El ruido está siempre presente, aunque el equipo esté apagado. • Ruido de cuantificación: Introducido en el Tx y se transporta todo el tiempo a través del Rx. Es un ruido dependiente de la señal, no existe cuando no está presente la misma. • Ambos aparecen simultáneamente en un sistema PCM pero los consideramos en forma separada, para ver sus efectos.
CONSIDERACIONES DE RUIDO – SISTEMA PCM • La fidelidad en la transmisión de información de un sistema PCM puede ser medida en términos de la probabilidad promedio de error de símbolo (probabilidad de que el símbolo reconstruido a la salida del receptor difiera del símbolo binario transmitido, en promedio) BER (Bit Error Rate). • Cuando es importante reconstruir la forma analógica de la señal mensaje, distintos errores de símbolo deberán ser considerados ó pesados en forma diferente. Ej.: un error en el bit más significativo de una palabra código es más influyente que un error en el bit menos significativo
CONSIDERACIONES DE RUIDO – SISTEMA PCM • Disminuir la Pe es el objetivo más importante • Consideremos un canal ruidoso aditivo, blanco y gaussiano. • El efecto del canal ruidoso puede ser prácticamente ininteligible asegurando una adecuada relación señal de energía del mensaje respecto de la densidad de ruido. De esta manera el ruido queda limitado al de cuantificación y (bajo el control del diseñador) actúa solo. Utilizando un adecuado número de niveles de representación en el cuantificador y selección de estrategia de compansión adecuada al mensaje a transmitir, el ruido puede mantenerse suficientemente pequeño.
UMBRAL DE ERROR – SISTEMA PCM • La probabilidad de error de símbolo en un sistema PCM binario, debido al ruido blanco, aditivo y gaussiano depende únicamente de la relación Eb/No, con Eb: Energía del bit transmitido y No: Densidad espectral de ruido. • Esta relación es adimensional aunque Eb y No, tiene significados físicos diferentes.
UMBRAL DE ERROR – SISTEMA PCM • De esta tabla queda claro que hay un umbral en 11 dB aproximadamente. • Para Eb/No por debajo del umbral de error, la performance del Rx involucra una cantidad significativa de errores y el efecto del ruido del canal queda enmascarado • Proveyendo una Eb/No por encima del umbral , el ruido del canal no tiene influencia en la performance del Rx (mayor ventaja de PCM)
Multiplexación TDM • TDM: Utilización conjunta de un canal de comunicaciones común por una pluralidad de fuentes de mensaje independientes, sin interferencia mutua entre ellas.
Multiplexación TDM • La función del conmutador es doble: • Tomar una muestra angosta de cada uno de los N mensajes de entrada a una frecuencia fs que es un poco mayor que 2W (W: frecuencia de corte del filtro antitraslape) • Intercalar en forma secuencial las N muestras dentro del intervalo de muestreo Ts. • Luego se aplica a un modulador por pulsos.
Multiplexación TDM • Se produce una expansión del ancho de banda N. • El esquema ajusta N muestras de N fuentes de mensaje independientes. • Las muestras angostas se distribuyen en filtros de reconstrucción adecuados • Conmutador y deconmutador en sincronismo, esencial para la operación satisfactoria del sistema.
Multiplexación TDM • TDM es sumamente sensible a la dispersión del canal común es necesaria la ecualización exacta de la respuesta, en amplitud y fase • TDM es inmune a las no linealidades en el canal como la diafonía. Esto se debe a que las señales de mensaje diferentes no se aplican simultáneamente en el canal.
Sincronización • Siaumenta la cantidad de fuentes de mensajes, el intervalo de tiempo que es posible asignar a cada fuente tiene que reducirse, ya que la totalidad de las mismas debe ajustarse a un intervalo de tiempo igual al recíproco de la frecuencia de muestreo (se reduce la duración permisible de la palabra código que representa a una muestra). • Pulsos cortos, difíciles de generar y transmitir . • El deterioro de los pulsos interfiere con la operación apropiada del sistema RESTRICCIÓN DEL NÚMERO DE FUENTES EN UN GRUPO TDM