IDE Controller Feasibility Review
220 likes | 245 Views
This project aims to develop an Ultra DMA module for a hard disk controller, following IDE ATA5 standards. The module will support PIO modes 0 to 4 and UltraDMA modes 0 to 4. The project includes RTL description, behavioral description, and functional and timing simulations using Cadence VerilogXL. The team members are Brian Kulig, Graig Plumb, James Pierpont, and Saif Shaikh, with Advisor Arun Ramanathan.

IDE Controller Feasibility Review
E N D
Presentation Transcript
IDE ControllerFeasibility Review Group Members Brian Kulig Graig Plumb James Pierpont Saif Shaikh Advisor Arun Ramanathan
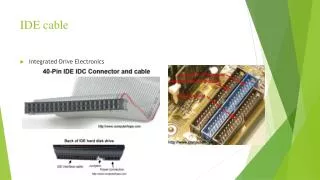
Development of an Ultra DMA Module for a Hard Disk Controller • Specifications – IDE ATA5 Standards • RTL Description of PIO and Ultra DMA (Direct Memory Access) Module in Verilog HDL (Support for PIO Modes 0 to 4 & UltraDMA Modes 0 to 4) • Behavioral description of the Hard Disk Interface • Functional and Timing Simulations using Cadence VerilogXL
Architecture IDE CHANNEL0 IDE FSM PIO MODULE To Hard Disk Fifo’s and Rest of System DMA MODULE PIO MODULE IDE FSM To Hard Disk Fifo’s and Rest of System DMA MODULE IDE CHANNEL1
PIO Design • 5 Modes 0 - 4, used for control signals • Timer, begins on start pulse • Signals dependent on rw • Timer reset at specific time • Example mode 0 resets at 67 • IORDY can delay system up to 1250 ns • Databus enabled by data write
Test Bench • It simulates controller for our module • It produces are varying waveforms for the different modes • Evolve into a hard disk with the implementation of UDMA
Phases of Ultra DMA Data Transfer • Initiating UDMA Data-In (Out) Burst • Data-In (Out) Transfer • Pausing Data-In (Out) Burst • Terminating Data-In (Out) Burst
Description of the Host • The Host Has: • A Read Buffer and a Write Buffer • Ability to cycle through and request all modes of data transfer • Ability to Calculate CRC Values as well as periodically send an error to the controller
CRC Error Checking Design • Process: • Both Devices are initialized with 4ABA • Value is modified on every STROBE pulse • using G(X) = X16 + X12 + X5 + 1 • Host ---> CRC ---> Controller • Bits 2 & 7 in Error Register go high • <----- 04 HARDWARE ERROR • Host Should Retry last command
Who’s doing What. • Saif: Program DMA mode RTL Code, Update Website • James: Program DMA mode RTL • Brian: Implement Error Checking, Describe Host in Behavioral Verilog • Graig: Interface PIO Mode with DMA, Describe Hardrive in Behavioral Verilog
Finishing Everything on Time • Our Goal is finishing on May 8th • We have all the tools and know how to use them. • We have all the specifications in hand. • All team members know their tasks
References • General IDE Information: • pcguide.com • hardwarecentral.com • ATA5 Specification: t13.org • Our Website: • www-unix.ecs.umass.edu/~sashaikh/ece559/index.html