Download
1 / 70
700 likes | 952 Views
Understanding symmetry in molecules is key to determining optical activity. Chirality, dipole moments, and point groups are explored, shedding light on molecular behavior. Dive into symmetry operations, polarization, and classifying molecules based on their elements and properties. Discover the rules governing optical activity and polarizability in different molecular configurations. Uncover the intricate relationship between symmetry elements and molecular behavior in this engaging exploration of chemical symmetry.

E N D
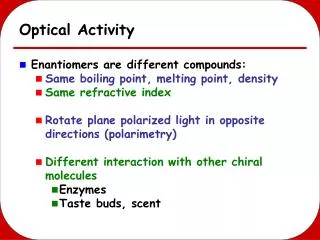
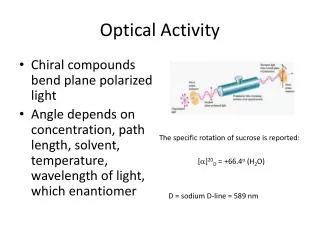
Immediate Consequences of SymmetryI. Optical Activity (Chirality) • If a mirror image of a molecule cannot be superimposed on the original the molecule is chiral. • Chiral molecules are optically active in the sense that they rotate the plane of polarized light. • For complex molecules this is difficult to visualize and symmetry elements may assist in the determination of optical activity.
Cannot Have Sn • A molecule which contains an n-fold improper axis is always superimposable on its mirror image. Recall that Sn consists of a rotation followed by a reflection. • Since a reflection creates the mirror image, Sn is equivalent to rotating in space the mirror image. By definition, a molecule containing an Sn axis is brought into coincidence with itslef by the Snoperation and hence its mirror image, after rotation, is superimposable.
Watch out! • It follows from symmetry that a molecule may only be chiral if it does not possess an improper rotation axis, Sn . • This element may be implied by other elements present. Recall that S2 is equivalent to i . Also, S1 is equivalent to s. • Therefore, molecules with any one of s, i, or Sn cannot be optically active.
2. Dipole moment • A polar molecule is one with a permanent electric dipole moment. • This can be the case only if the center of negative and positive charges do not coincide. • Since a symmetry operation leaves a molecule in a configuration physically indistinguishable from before, the direction of the dipole moment vector must also remain unchanged.
Must coincide with symmetry elements • The direction of the dipole moment must be coincident with each of the symmetry elements. It cannot be perpendicular to any mirror plane or axis of rotation. • If a molecule has a Cnaxis, the dipole must lie along this axis. If there is a s, it must lie in this plane; if several planes, it must lie at their intersection. E.g., for NH3, dipole moment is along C3axis, which is also intersection of 3 sv.
Limits point groups with dipoles • It follows that molecules with an i (operation reverses direction of vectors)or with two or more non-coincident Cn axes (dipole moment cannot lie on two axes at the same time) cannot have a dipole moment (this rules out the D and higher symmetry families). • Only molecules belonging to Cn , Cnv , or Cs may have a dipole moment. For Cn and Cnv , the dipole moment must lie along the symmetry axis, and n may be any value from 1 to . • Thus, we must include C1 and Cvin these categories.
In-class activity • Which of the following are:a) polar b) optically active • CCl4 CHCl3 CO CO2 • H2O2 (skew) H2O2 (staggered)
Point Groups and Multiplication Tables • A point group is a set of symmetry operations that form a complete multiplication table containing all products and reciprocals of its elements. • Multiplication of two symmetry operations is defined as a sequence of symmetry operations. • The product C4 means “do the operation and then do the C4 on the figure that results from doing the operation.” • Note that the order of execution of the symmetry operations is from right to left.
Every multiplication table must contain the identity. • Every symmetry operation must have a reciprocal which is defined as the symmetry operation done in reverse. • The product of a symmetry operation and its reciprocal is the identity operation.
Definition of a group • A group is any collection of elements which together with some well-defined combining operation (ordinary algebra, matrix algebra, one operation followed by another, etc.) obey a certain set of rules. • The ‘product’ or combination of any two elements in a group must produce an element which is also in the group. • The group must contain the identity element, which combines with any element in the group, leaving that element unchanged.
The associative law must hold for all elements of the group. • Every element must have an inverse (combined, they yield identity) which is also a member of the group.
Order and Classes • The number of symmetry operations in a group is called the order of the group, h. • A group always consists of at least two subgroups, each of which satisfies the requirements for a group. • The identity is always a subgroup of order 1. • The order, g, of a subgroup, is always an integral divisor of the order, h, of the group to which it belongs. • A group always consists of two or more classes, each of which contains symmetry operations which can be transformed into one another by a symmetry operation of the group.
C2, v C3, S3 C2, v C2, v Molecular plane is h. The C3 and C32 operations are in the same class. The S3 and S35 operations are in the same class. Note that the separate existence of a C3 and a h requires the existence of an S3 axis. The three C2 axes are equivalent so the C2 operations are in the same class. The three v planes are equivalent so the v operations are in the same class.
Rules For Symmetry Operations and Classes • The Inversion: • There is only one inversion and it is always in a class by itself. • Reflections: • Reflection in a plane perpendicular to the axis of highest symmetry is designated h and forms a separate class. • Reflection in a plane that contains the axis of highest symmetry and passes through several atoms is designated v. All are in the same class. • Reflection in a plane that contains the axis of highest symmetry and passes between sets of atoms is designated d. All are in the same class.
Proper Rotations: • In the Cn point groups, Cn, Cn2, Cn3, etc are in separate classes. • In groups of higher symmetry, Cnm and Cnn-m are in the same class.
Systematic Generation of Point Groups • We will examine the generation of some of the simpler point groups by constructing multiplication tables for symmetry operations. • Each point group is generated by starting with the identity and at least one other symmetry operation. • The additional symmetry operations needed to complete the point group will arise automatically since all products must be members of the group. • Multiplication is not necessarily commutative (AB is not necessarily the same as BA). • Multiplication is always associative (A[BC] = [AB]C). • No two rows and no two columns in a multiplication table can be the same.
Schönflies symbol for the point group. C1 E E E Groups of Low Symmetry No symmetry: Only the identity is a symmetry operation. The designation of this as the C1 point group means that the identity operation is considered as a C1 rotation axis. Since C1 is rotation by 2/1, this corresponds to doing nothing to the object.
Cs E h E E h h h E h is reflection in the molecular plane. Since there is only one reflection plane, it is automatically the molecular plane. Note that, like the number 1, the identity multiplied by anything else leaves the thing it is multiplied by unchanged. Multiplication by the identity is always commutative.
C3 E C3 C32 C3 E E C32 C3 C3 C32 E C32 C32 E C3 C32 C32 = four C3 operations in sequence = C34 = C33C3 (associative law) Since C33 = E, C32C32 = EC3 = C3 (multiplication by the identity doesn’t change anything) Note that the product C3C3 has generated the new product C32 which must also be a member of the group.
Vectors, Matrices and Point Groups • In the quantum description of a chemical bond, the wavefunctions for the electrons in the bond have the same directional properties as the bond. • Since wavefunctions for the electrons in a bond have directional properties, they can be treated as vectors. • Group Theory provides a systematic classification of vectors in terms of their geometric properties. • Any vector can be written as the product of a column matrix of unit vectors and a square matrix describing the geometric properties of the vector. • The properties of this square geometric matrix provide the quantitative link between Group Theory and chemical bonding.
Representations of Point Groups • Each symmetry operation has geometric properties that can be expressed in a geometric transformation matrix that is specific for that operation. • A complete set of geometric transformation matrices for the operations of a point group as applied to a particular object is called the representation of the group. • In many cases, the full geometric transformation matrix consists of smaller square matrices arranged along the diagonal of the larger matrix. Corresponding sets of these smaller matrices are also representations of the group. • Representations consisting of matrices that do not factor into smaller ones are called irreducible representations. • The dimension of a representation is the number of rows or columns in its geometric transformation matrices.
a b c d e f g h i 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 j k l m 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 n o p q r s t u v w x y z
The Characters of Matrices • Using the full geometric matrices is very cumbersome • Each atom in a molecule requires three unit vectors (three coordinates) to locate it. • For a molecule containing n atoms the geometric matrix would be 3n x 3n for each symmetry operation in the group. • It is much more convenient to describe the molecule in terms of the characters of the geometric transformation matrices. • The character, , of a square matrix is the sum of its diagonal elements. • The representations of molecules are nearly always written as the characters of the symmetry operations, not as the actual geometric transformation matrices.
Notes • The principal rotation axis is chosen as the z-axis. • There is always one completely symmetric irreducible representation (each element is 1).
Initial Vector x, y plane Reflected Vector x1 y1 z1 1 0 0 0 1 0 0 0 -1 The Geometric Transformation Matrices Reflection in a Plane: The x and y unit vectors are in the reflection plane and are unchanged. The z unit vector is perpendicular to the plane and reverses. x2 y2 z2 x2 = x1 + 0 y1+ 0 z1 y2 = 0 x1 + y1 + 0 z1 z2= 0 x1 + 0 y1 – z1 = In general, for a reflection transform, all off-diagonal elements are 0, on-diagonal are 1 for coordinates in plane, -1 for the other. Transformation matrix
x1 y1 z1 -1 0 0 0 -1 0 0 0 -1 Inversion: x2 = -x1 + 0 y1+ 0 z1 y2 = 0 x1 - y1 + 0 z1 z2= 0 x1 + 0 y1 - z1 x2 y2 z2 = 0 if off-diagonal, -1 on-diagonal (all coordinates are inverted).
x1 y1 z1 cos -sin 0 sin cos 0 0 0 1 Proper Rotation by an angle : x2 y2 z2 = We now have non-zero off-diagonal elements, which sometimes complicates matters, which we’ll try to avoid in this course.
x1 y1 z1 cos -sin 0 sin cos 0 0 0 -1 Improper Rotation: x2 = x1 cos - y1 sin + 0 z1 y2 = x1 sin + y1 cos + 0 z1 z2 = 0 x1 + 0 y1 – z1 x2 y2 z2 = The only difference from the proper rotation is the effect on the z vector of the reflection perpendicular to the rotation axis.
Rules for Manipulating Representations • The sum of the squares of the dimensions (li2) of the irreducible representations of a group is equal to the order (h) of the group. • The sum of the squares of the characters ([i(R)]2) in any one irreducible representation of a group equals the order (h) of the group. (R is any symmetry operation, is the character, i and j for different representations)
The vectors whose components are the characters [i(R)] of two different irreducible representations (i and j) are orthogonal. • In any given representation, either reducible or irreducible, the characters of all matrices belonging to the same class are identical. • The number of irreducible representations in a group is equal to the number of classes in the group.
Application to the C2v Point Group • This point group has four symmetry operations, E, C2, v(x,z) and v(y,z). Each is in a separate class. Number of irreducible representations = ?? (Rule 5) 4 Possible dimensions of representations are ?? (Rule 1) 1 • Since the order of the group is 4, the sum of the li2 = 4. • There are four irreducible representations and the smallest possible matrix is 1x1 so the smallest possible value of l is 1. • Only l = 1 will sum to 4 when squared and added four times.
x1 y1 z1 x1 y1 z1 cos -sin 0 sin cos 0 0 0 1 1 0 0 0 1 0 0 0 1 x2 y2 z2 x1 y1 z1 -1 0 0 0 -1 0 0 0 1 x1 y1 z1 1 0 0 0 -1 0 0 0 1 x1 y1 z1 -1 0 0 0 1 0 0 0 1 x2 y2 z2 x2 y2 z2 C2 E = = For C2 : θ = 180° Therefore sin 180° = 0 and cos 180° = -1 = σv(xz) σv’(yz) x2 y2 z2 x2 y2 z2 = =
[1] 0 0 0 [1] 0 0 0 [1] [-1] 0 0 0 [-1] 0 0 0 [1] [-1] 0 0 0 [1] 0 0 0 [1] [1] 0 0 0 [-1] 0 0 0 [1] We now “block diagonalize” each transformation matrix- break it down into smaller matrices including the non-zero elements along the diagonal. In this case the x, y, z axes are also block diagonalized, and can be treated independently. E C2 σv(xz) σv’(yz)
E C2 v(xz) v(yz) 1 -1 1 -1 1 -1 -1 1 1 1 1 1 3 -1 1 1 coordinate x y z Γ Here we have composed representations by simply transcribing the element (the character of a 1x1 matrix) in the 1,1 position of each transformation matrix, which describes the result of the symmetry operation on the x axis; and similarly for 2,2 (y) and 3,3 (z). By adding the values in each column above, we can get a reducible representation.
4th representation • We obtain this by following all the rules: - The character for the identity must be 1 - The sum of squares of the characters in each representation must equal the order (4) - No two representations may be the same - The representations must all be • orthogonal to each other.
C2v E C2 v(xz) v(yz) 1 1 1 1 1 2 1 -1 1 -1 3 1 1 -1 -1 4 1 -1 -1 1
The Structure of Character Tables • The left-hand column gives the Schönflies symbol for the point group with the Mulliken symbols for the irreducible representations below it. • The main part of the table has the symmetry operations at the top, arranged in classes, with the identity at the left followed by the other symmetry operations starting with the highest order rotation axis and followed in order of decreasing symmetry. Below this are listed the characters for the symmetry operations in each irreducible representation. • At the far right are two columns showing the transformation properties of coordinates and their squares and cross-products.
Rules for Assigning Mulliken Symbols • All one-dimensional representations are either A or B. Two-dimensional representations are E and three-dimensional ones are T or F. • One-dimensional representations that are symmetric (positive character) with respect to rotation about the principal axis are A while those that are antisymmetric (negative character) are B. • The subscript 1 designates an A or B representation that is symmetric with respect to rotation about a C2 Cn or, in its absence, is symmetric with respect to a v. The subscript 2 indicates antisymmetric behaviour. • A ‘ designates symmetry with respect to a h. A “ indicates antisymmetric behaviour.
The subscript g (for gerade meaning even in German) indicates symmetry with respect to inversion. The subscript u indicates antisymmetric behaviour. The column containing x, y, z, Rx, Ryand Rzgives the irreducible representations for translation along the three Cartesian axes (x, y, z) and for rotation about the three Cartesian axes (Rx, Ry, Rz). The column at the far right containing the squares and cross-products gives the irreducible representations for properties (such as d-orbital wavefunctions and molecular polarizability) that depend on these squares and cross-products.
C2v E C2 v(xz) v(yz) A1 • 1 1 1 z x2, y2, z2 A2 Rz xy 1 1 -1 -1 x, Ry xz B1 1 -1 1 -1 1 -1 -1 1 B2 y,Rx yz
Groups with Classes Larger than 1 • Recall that the characters of all the matrices in a class are identical. This means that • Character tables can be compressed by lumping all the operations in a class in a single column. • The sums over symmetry operations required in analyzing representations can be taken over classes provided we multiply the product for a given class by the order, g, of the class. Remember that the class order for each symmetry operation can be different. Rule 2: Rule 3:
C3v E 2C3 3v Consider the C3v Point Group 1 1 1 1 2 1 1 -1 3 2 -1 0 Rule 5: There are 3 classes so the number of irreducible representations = ? 3 Rule 1: There are 6 operations so l2 = 6 l =?? 1, 1, 2 For the one dimensional representations, can be?? ± 1 For the two dimensional representation, (E) has to be?? 2 since each diagonal element has to be 1 (the unit vectors are unchanged). This means that (C3) =?? -1 and (v) =?? 0.
x1 y1 z1 x1 y1 z1 cos -sin 0 sin cos 0 0 0 1 1 0 0 0 1 0 0 0 1 x1 y1 z1 -1/2 -√3/2 0 √3/2 -1/2 0 0 0 1 x1 y1 z1 1 0 0 0 -1 0 0 0 1 x2 y2 z2 x2 y2 z2 2C3 E = = x2 y2 z2 For C3 : θ = 120° (2p/3) Therefore sin 120° = √3/2 and cos 120° = -1/2 = 3σv(xz) x2 y2 z2 =
1 0 0 0 1 0 0 0 [1] 1 0 0 0 -1 0 0 0 [1] The transformation matrix for C3 cannot be block diagonalized into 1x1 because it has off-diagonal elements. It can be blocked into 2x2 and 1x1 matrices; the others must follow the same pattern for consistency. -1/2 -√3/2 0 √3/2 -1/2 0 0 0 [1] E 2C3 The C3 matrix must be blocked this way because the (x,y) combination is needed for the new x,y coordinates. 3σv(xz)
C3v E 2C3 3v Building the representations coordinate z 1 1 1 1 2 1 1 -1 x, y 3 2 -1 0 Here we will compose the 2-D representation by taking the characters of the 2x2 matrices (summing along the diagonal), and one of the 1-D representations from the characters of the 1x1 matrices. The third representation can be found by using the defining properties of group tables.
Practice problem • For the D2d point group (character table on next slide): • A) determine the order of the group • B) test the E representation for orthogonality with the other 4 representations (Rule 3) • C) Confirm that the sum of the squares of the characters in each irreducible representation equals the order of the group (Rule 2)
D2d E 2S4 C2 2C2’ 2d A1 1 1 1 1 1 A2 1 1 1 -1 -1 B1 1 -1 1 1 -1 B2 1 -1 1 -1 1 E 2 0 -2 0 0
Reducing Reducible Representations • Virtually every practical application of group theory starts with a reducible representation. • All reducible representations contain some integer multiple of each of the irreducible representations of the point group. • The application of group theory to problems begins by determining how many of each kind of irreducible representation are contained in the reducible representation. • The irreducible representations can be thought of as being like components of a vector and determine the geometric features of the phenomenon being analyzed.
We could construct a reducible representation for a point group by multiplying each irreducible representation by some integer, a, and adding the result for each symmetry operation, R, over all irreducible representations. The character of each symmetry operation in the reducible representation would then be • We normally start with a knowledge of (R) in the reducible representation and need to determine the value of ai for each irreducible representation in the group. • Since irreducible representations are orthogonal, if we multiply the characters in the reducible representation by those in a given irreducible representation, only the terms for the “test” irreducible representation will survive.
These observations can be summarized in the equation in which (R) is the character for symmetry operation R in the reducible representation and i(R) is the character for the same symmetry operation in the ith irreducible representation. ai is the number of times the ith irreducible representation is repeated in the reducible one.