Download

1 / 17
170 likes | 669 Views
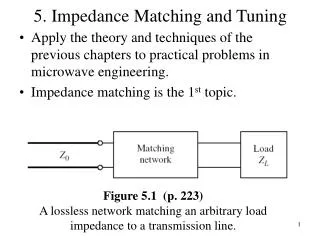
控制原理專題報告 PID controllers: recent tuning methods and design to specification. 指導教授 : 曾慶耀 老師 姓名 : 張起銘 學號 :19967003. Introduction two-degrees-of-freedom (2DF) Ziegler-Nichols (ZN) method OLDP method Genetic algorithms for PID tuning PID tuning using the theory of adaptive interaction

E N D
控制原理專題報告PID controllers: recent tuning methods and design to specification 指導教授:曾慶耀 老師 姓名:張起銘 學號:19967003
Introduction • two-degrees-of-freedom (2DF) • Ziegler-Nichols (ZN) method • OLDP method • Genetic algorithms for PID tuning • PID tuning using the theory of adaptive interaction • Conclusion
Introduction • PID控制器,多年以來成功地運用在控制策略上。穩健性、廣泛的適用性接近最優的性能,這是PID控制在學術界和工業界部門如此受歡迎的原因。 最近,已經注意到PID控制器通常是缺乏調整和一些努力,因此想要有系統地解決這個問題。在論文中簡要介紹了PID的理論,其中是一些最常用的PID整定方法,將一些較近期而有希望的技術進行了探討 。
2DF PID • 在Kd項加入一個低通濾波器,以減少雜訊放大. • 是指濾波器的時間常數.
2DF PID • Gsp(s)是從信號傳輸到控制變量和Gs(s)的設定值 • Gs(s)是信號傳輸過程中輸出的控制變量
Ziegler-Nichols (ZN) method • 增益 為開迴路反應的瞬態部分 • L 為絕對時間
Ziegler-Nichols (ZN) method • 其中 Kappa-tau tuning提到兩個版本 • :控制器參數的標準化絕對時間的函數 • T :時間常數 • Ku :最終增益Tu :最終週期
OLDP method • OLDP 是D-partitioning的延伸 • 當 ,然後開迴路轉移函數為 PID的情況下 • 然後s由 取代,特徵方程式變為 • 其中 為
OLDP method • 為了在參數空間獲得所需的增益和相位邊限,要繪製三頻域邊界。這些邊界得到考慮以下三種情況: • 對於 PI 的情況下特徵方程的形式如下: • 當 所以 • 在 邊界描述為 • 最後當 • 他的界限是由
Genetic algorithms for PID tuning • 要獲得PID參數通常要減少一個性能指標。這在大多數情況下,是下列之一: • r(t)為參考輸入 y(t)為系統輸出
PID tuning using the theory of adaptive interaction • 基於自適應相互作用的理論,自適應方法在整定PID控制器使用。通過最小化的一個性能指標得到調整(例如誤差平方)。控制系統被分解成四個子系統; 即受控廠,比例控制,積分控制和微分控制,Gp,Kp,Ki,Kd被視為四個子系統之間的相互作用參數。 • 適應性演算法 • 其中 • o 符號表示組成 • 為表示輸入和輸出的空間
PID tuning using the theory of adaptive interaction • 誤差平方最小化提供以下自動調整參數作為性能指數: • 然後,Frkchet微分近似 ….(2) • 代入(1)式 得
PID tuning using the theory of adaptive interaction • 這種方法的優點是,它可以適用於開迴路穩定和不穩定的受控廠,包括系統的時間延遲,它能改變系統的參數和干擾進入系統。
Conclusion • 本文介紹了PID控制的概述其優點,缺點和不同的調整方法。普通的PID整定方法他的效果是有限的。而智能型PID控制的新方法,利用標準化絕對時間的概念和規範化的過程中獲得 ,不過PID可能沒辦法應付某些情況。例如,不只一個震盪情形的模式,或有大量時間延遲或複雜的干擾行為。 PID是一種很有前途的控制策略,值得進一步研究和調查。而且在工業界和學術界上有很多獲益。
1 ASTROM, K.J., and HAGGLUND, T.: ‘Automatic tuning of PID controllers’ (ISA, 1988) 2 ASTROM, K.J., and HAGGLUND, T.: ‘PID control’in ‘The control 3 ZIEGLER, J.G., and NICHOLS, N.B.: ‘Optimum settings for automatic controllers’, Trans. ASME 1942, 64, pp. 759-768 4 HAGGLUND, T., and ASTROM, K.J.: ‘Automatic tuning of PID controllers’ in ‘The control handbook’, 1996, pp. 817-826 5 ASTROM, K.J., HANG, C.C., PERSSON, I?, and HO, WK.: ‘Towards intelligent PID control’, Automatica, 1992, 28, (I), pp. 1-9 6 SOYLEMEZ, M.T.: ‘Pole assignment for uncertain systems’ (UMIST, Control Systems Centre Series, 1999) 7 ASTROM, K.J., and HAGGLUND, T.: ‘Automatic tuning of simple regulators with specifications on phase and amplitude margins’, Automatica, 1984, 20, pp. 645-65 1 HO, W.K., HANG, C.C,, and CAO, L.S.: ‘Tuning of PID controllers based on gain and phase margin specifications’, Automatica, 1995, 31, 9 SHENTON, A.T., and SHAFIEI, 2.: ‘Relative stability for control systems with adjustable parameters’, 1 Guid. Control Dyn., 1994, 17, pp. 304-310 10 SHAFIEI, Z., and SHENTON, A.T.: ‘Tuning of PID-type controllers for stable and unstable systems with time delay’, Automatica, 1994,30, (lo), pp. 1609-1615 11 SHAFIEI, Z., and SHENTON, A.T.: ‘Frequency-domain design of PID controllers for stable and unstable systems with time delay’, Automatica, 12 BHATTACHARYYA, S.P., CHAPELLAT, H., and KEEL, L.H.: ‘Robust control: the parametric approach’ (Prentice Hall, 1995) 13 CHAPELLAT, H., and BHATTACHARYYA, S.P.: ‘A generalization of Kharitonov’s theorem: robust stability of internal plants’, IEEE Trans. Autom. Control, 1989, 34, pp. 306-311 14 BARTLETT, A.C., HOLLOT, CY, and LIN, H.: ‘Root location of an entire polytope of polynomials: it suffices to check the edges’, Math. Control Signals Syst., 1998, 1, pp. 61-71 15 HO, M.T., DATTA, A,, and BHATTACHARYYA, S.P.: ‘Design of P, PI and PID controllers for interval plants’. Proceedings of the American Control Conference, Philadelphia, Pennsylvania, June 1998, pp. 2496- 2501 16 MING-TZU, H., DATTA, A,, and BHATTACHARYYA, S.P.: ‘-1- izations of the Hermite-Biehler theorem’, Lin. Alg. Appl., 1999, 17 BULUT, B.: ‘The systematic design of PID controllers’, MSc thesis, CSC, UMIST, Manchester, UK, 1998 18 XU, H., DATTA, A., and BHATTACHARYYA, S.P.: ‘Computation of all stabilizing PID gains for digital control systems’, IEEE Trans. Autom. Control, 2001,46, (4), pp. 647-652 19 MUNRO, N.: ‘The systematic design of PID controllers for continuous and discrete systems’. IEE Colloquium on Advances in computer-aided control systems design, Birmingham, June 1999 20 MUNRO, N., and SOYLEMEZ, M.T.: ‘Fast calculation of stabilizing PID controllers for uncertain systems’. IFAC Conference, ROCOND, Prague, June 2000 21 SILVA, G.J., DATTA, A,, and BHATTACHARYYA, S.P.: ‘Stabilization of time delay systems’. Proceedings of the American Control Conference, Chicago, Illinois, June 2000, pp. 963-970 22 O’MAHONY, T., DOWNING, C.J., and FATLA, K.: ‘Genetic algorithms for PID parameter optimization: minimizing error criteria’. Cork Institute of Technology, Cork, Ireland, pp. 148-153 23 LIN, F., BRANDT, R.D., and SAIKALIS, G.: ‘Self-tuning of PID controllers by adaptive interaction’. Proceedings of the American Control Conference, Chicago, Illinois, June 2000, pp. 3676-3681 24 BRANDT, R.D., and LIN, E: ‘Supervised leaming in neural networks without explicit error back-propagation’. Proceedings of the 32nd Annual Allerton Conference on Communication, control and computing, 1994, pp. 294-303 25 LUENBERGER, D.G.: ‘Optimization by vector space methods’ (John Wiley, 1969) 26 ISAKSSON, A.J., and GRAEBE, S.F.: ‘Model reduction for PID design’. IFAC World Congress, Sydney, Australia, 1993, Vol. 8, 27 ISAKSSON, A.J., and GRAEBE, S.F.: ‘Analytical PID parameter expressions for higher order systems’, Automatica, 1999, 35, (6), pp. 1121-1130 28 RIVERA, D.E., MORARI, M., and SKOGESTAD, S.: ‘Internal model control. Part 4: PID controller design’, Int. Eng. Chem. Process. Des. Dev., 1986,25, pp. 252-265 29 GARCIA, C.E., and MORARI, M.: ‘Internal model control. Part 2: A unifying review and some new results’, Ind. Eng. Chem. Process. Des. Dev., 1982,21, pp. 308-323 30 THOMASSON, EY.: ‘Controller tuning methods’in SELL, N.J. (Ed.): ‘Process control fundamentals for the pulp and paper industry’ (Tappi Press, 1995), pp. 2 15-274 31 DAHLIN, EB.: ‘Designing and tuning digital controllers’, Insti: Control pp. 257-262 syst., 1968, pp. 42-73 32 KAHNE, S.: ‘Pole-zero cancellations in SISO linear feedback systems’, 33 ISAKSSON, A.J., and GRAEBE, S.F.: ‘Model reduction for design of IEEE Trans. Educ., 1990, 33, (3), pp. 240-243 digital PID controllers’. Proceedings of the 3rd European Control Conference, Rome, Italy, September 1995, pp. 2191-2196 34 RIVERA, D.E., and MORARI, M.: ‘Control-relevant model reduction problems for SISO H2, H,, and p-controller synthesis’, Int. 1 Control, 35 ANDERSON, B.D.O., and LIU, Y.: ‘Controller reduction: concepts and approaches’, IEEE Trans. Aucom. Control, 1989, 34, (X), pp. 802-812 36 KEVICZKY, L., and BANYASZ, C.: ‘Designing PID regulators using K-B-parametrization’. Process control and instrumentation. Glasgow, 37 UMLAND, J., and SAFIUDDIN, M.: ‘Magnitude and symmetric optimum criterion for the design of linear control systems-What is it and how does it compare with the others?’, IEEE Ind. Appl. Soc. Trans., May/June 1990 38 ASTROM, K.J., and HAGGLUND, T.: ‘PID controllers: theory, design, and tuning’ (Instrument Society of America, 1995, 2nd edn.) 39 RAKE, H.: ‘Identification: transient and frequency response methods’ (System-s and Control Encyclopedia, August J 987) 40 VRANCIC, D., PENG, Y., and PETROVCIC, J.: ‘A new simple autotuning method for PID controllers’. Preprints of the 2nd IFAC Workshop on the New trends in design of control systems, Smolenice, August 1991, pp. 451462 41 GRASSI, E., TSAKALIS, K., DASH, S., GAIKWAD, S.V, MACARTHUR, W., and STEIN, G.: ‘Integrated system identification and PID controller tuning bv freauencv looo-shanine’. IEEE Trans. 1987,46, (2), pp. 505-527 2000, pp. 356-363 1 a , Control Syst. Technol., 20;01,9, (2): pp. ?!85-i94 42 GRASSI, E., and TSAKALIS, K.: ‘PID controller tuning by frequency loop-shaping: Application to diffusion fumace tempeGt&e control’, IEEE Trans. Control Syst. Technol., 2000, 8, (5), pp. 842-847 43 VODA, A,, and LANDAU, LD.: ‘A method for the auto-calibration of References