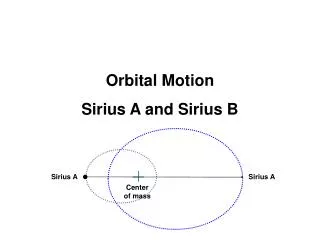
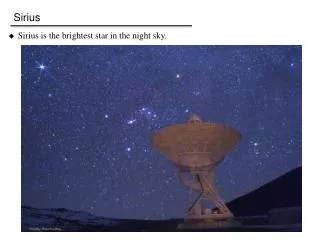
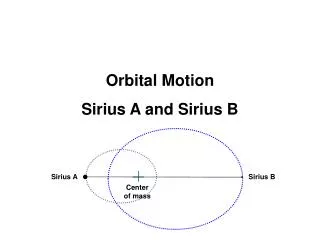
SIRIUS
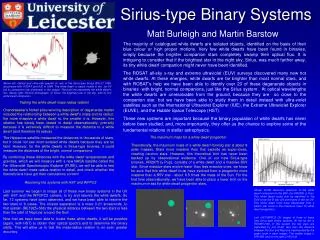
幾何情報 ( G ). SPK. SCLK. CK. L2[PDS] ( 公開データ ). L0. L1a[FITS]. L1b[FITS]. 圧縮を解いた 数値画像 ( A ). B から抜き出し C で変換した header( D ). header(= D ). header ( H = D + G ). 画像 (= A ) (count). 画像 ( F = A * E ) (Intensity). 画像 (= F ). A に対応する 画像付帯情報 ( B ). Cal. Table ( E ). 軌道 G から.

SIRIUS
E N D
Presentation Transcript
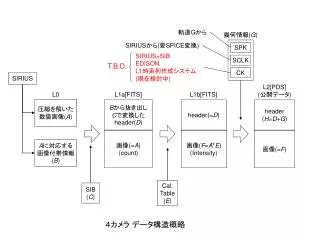
幾何情報(G) SPK SCLK CK L2[PDS] (公開データ) L0 L1a[FITS] L1b[FITS] 圧縮を解いた 数値画像(A) Bから抜き出し Cで変換した header(D) header(=D) header (H=D+G) 画像(=A) (count) 画像(F=A*E) (Intensity) 画像(=F) Aに対応する 画像付帯情報 (B) Cal. Table (E) 軌道Gから SIRIUSから(要SPICE変換) SIRIUS+SIB EDISON L1時系列作成システム (現在検討中) T.B.D. SIRIUS SIB (C) 4カメラ データ構造概略
LIRの場合 カメラ担当 カメラ担当 Cal. Table 作成 Cal. Table 作成 [カメラ担当] IR1:岩上・大月 IR2:佐藤・上野 LIR:田口・福原 UVI:山田・山崎 Cal. Table 温度 Cal. Table 温度 L1b処理 (周辺減光補正) L1a L1b L1c処理 L1c IR1,IR2,UVIの場合 カメラ担当 カメラ担当 SIB作成 Cal. Table 作成 L0 image C-SODA PLANET-C SIB Cal. Table 画像付帯 情報1 L0 Raw Packet Telemetry L0処理 L1a処理 L1a L1b処理 L1b L0 画像付帯 情報2 SDTP SIRIUS ・・・ ・未較正 ・幾何情報無し L0 ・既較正 ・幾何情報無し 画像付帯 情報n L0-L1:山崎+カメラ+DE LACの場合 カメラ担当 (単位換算用) カメラ担当 (ノイズ除去用) Cal. Table 作成 Cal. Table 作成 L0,L1 パイプライン Cal. Table1 Cal. Table2 温度 L1a L1b処理 L1b
SIRIUS SIRIUS C-SODA:山本+岡田 SPICE SPK 基準時刻 ファイル Raw Packet Telemetry 各カメラIK担当 IR1: 大月 IR2: 中村 LAC: 星野 LIR: 福原 UVI: 山田 軌道G C-SODA 公開サーバ PLANET-C PLANET-C FTP? SDTP SDTP SPK取得 SCLK作成 IK作成 CK作成 SPICE:平田+中村 SPICE SCLK SPICE CK SPICE SPK SPICE SCLK SPICE CK SPICE IK SFTP? SPICE SPK SPICE IK PDS作成 [L2topds (仮)] 軌道番号 ファイル作成 SFTP? L2 FITS作成 [L1toL2 (仮)] L2 L1b L2 1. ヘッダに幾何情報を加えたFitsファイル 2. 各画素の幾何情報プレーン8枚からなるFitsファイル FITSキーワード PDSキーワード 説明文書 L2処理サーバ L2:はしもと+山田 L2データパイプライン
C-SODA, Rawデータ編集 • 体制 • 責任者: C-SODA岡田 • 上流 • 臼田局、内之浦局、海外DSN局、試験設備 • 機能 • Planet-Cへ、時刻・受信局の編集を行ったSDTPインタフェース可能なCCSDS形式のRawデータを提供する。 • Rawデータを保管する。 • 下流 • Planet-C L0処理系へのSDTP転送 • 開発状況 • 開発済み
L0処理系 • 体制 • 責任者:山崎 • 関係者: 山崎、各カメラ1名、DE鈴木、LAC • 開発期間 • 上流 • C-SODAからSDTPインタフェースで、CCSDS形式のRawデータを受信する。 • 機能 • CCSDS形式データをデパケットし • DEの画像ID、TI値に基づきファイル名を決め • タイル化された圧縮データから画像を復元し • 画像情報・画像付帯情報を編集し、ヘッダの構成を行い • FITS形式のファイルを作成する • 下流 • L0画像データ(カウント値画像)を編集・作成し、L1a生成処理系への引き渡し領域に保管する。 • L0画像付帯情報データを編集・作成し、L1a生成処理系への引き渡し領域に保管する。
L0ファイルフォーマット 各カメラデータ ディレクトリ:./camera名/yyyy/mm/dd-pppp / 画像付帯情報(DR記録パーティション:0x0A) 画像ID(Dec)_地上受信時刻(hhmmdd)_衛星時刻TI(Hex).ihd 共通ヘッダ(DR記録パーティション:0x07) 画像ID(Dec)_地上受信時刻(hhmmdd)_衛星時刻TI(Hex).hrw.chd (Hirew) 画像ID(Dec)_地上受信時刻(hhmmdd)_衛星時刻TI(Hex).jpc.chd (Jpeg2000) 観測データ(DR記録パーティション:0x07または0x08, 09, 0C, 0D, 0F) 画像ID(Dec)_地上受信時刻(hhmmdd)_衛星時刻TI(Hex)_タイル番号.img 画像ID(Dec)_地上受信時刻(hhmmdd)_衛星時刻TI(Hex).img *注:ユーザーデータ領域のヘッダ(6Byte)が含まれる Image ID(2Byte) Size (単位byte)(3Byte) タイル番号(1Byte)
L1a Processing System • 体制 • 責任者:山崎 • 主たる協力者: 北大・福原 • 上流 • L0処理系のディスク上のL0画像データ及びL0画像付帯情報データを読み出す • SIB情報を読み込む • Cal . Tableを読み込む • 機能 • 画像データと付帯情報データを編集しFITS形式L1aファイルを出力する。 • L1aデータを一時保管する。 • バックアップは? 予備機は? (←バックアップは行わない) • Cal. Tableを用いて画像データの輝度値を較正し、FITS形式L1bファイルを出力する。 • L1bデータを恒久保管する。 • バックアップは? 予備機は? (←C-SODAにお任せでよい?) • 下流 • バイナリー形式画像及び画像付帯情報、SIB情報、処理バージョン情報などを含んだFITS形式ファイルを命名規則に従って、L1B処理系とのインタフェース領域に保管する • Cal. Table情報、処理バージョン情報などを含んだFITS形式ファイルを命名規則に従って、L2a処理系とのインタフェース領域に保管する • コメント • 処理計算機は、L0, L1aで共通
L1a File Format Hirew画像 ディレクトリ:./camera名/QL_IMAGES/yyyy-mmdd / 観測データ(DR記録パーティション:0x07または0x08, 09, 0C, 0D, 0F) 画像ID(Dec)_地上受信時刻(hhmmdd)_衛星時刻TI(Hex).img *注:ユーザーデータ領域のヘッダ(6Byte)は除かれる 地上受信時刻は共通ヘッダの地上受信時刻で代表される
L1b Processing System • 体制 • 責任者:山崎 • 主たる協力者: 北大・福原 • 上流 • L1a処理系のディスク上のL1a画像データを読み出す • Cal . Tableを読み込む • 機能 • Cal. Tableを用いて画像データの輝度値を較正し、FITS形式L1aファイルを出力する。 • L1bデータを恒久保管する。 • バックアップは? 予備機は? • 下流 • Cal. Table情報、処理バージョン情報などを含んだFITS形式ファイルを命名規則に従って、L2a処理系とのインタフェース領域に保管する • コメント
L2 Processing System • 上流 • L1b処理系のディスク上のL1b画像データ(ヘッダ含む) • 処理に利用するL1b より受け取る必須キーワード。 • 観測機器名 [INSTRUME] • FILTER名 [FILTER] • 観測時衛星時刻 [ (P_SCCSC + P_SCCEC)/2 ] (単位は衛星時刻カウンタ) • 画像サイズ [NAXIS1,NAXIS2] • 画像切り出し情報 [BINNING, AX1_STRT, AX1_LAST, AX2_STRT, AX2_LAST] ※(キーワード未確定) • L1bで作成された他のキーワードは基本的に継承するのみ(管理情報などは必要に応じ更新) • SPICE カーネルより、衛星位置・姿勢情報、観測機器視野視線方向等の情報 • 機能 • 衛星時刻カウンタ(TI)を時刻(UTC)に変換 • 軌道情報、計算されたジオメトリ情報と時刻(UTC)を編集して画像ヘッダに付加する。 • 各画素の幾何学情報を計算してFITSフォーマットの別ファイルを作成 • 緯度/経度: NAXIS1xNAXIS2(画素中央)と[NAXIS1+1]x[NAXIS2+1](画素4隅) • 入射角/出射角/入射と出射の方位角の差/地方時: NAXIS1xNAXIS2 (画素中央) • 各ファイルの PDS ラベルファイルを生成 • 下流 • 処理バージョン情報などを含んだFITS形式ファイルを命名規則に従って保管 • 公開系へデータ転送
機上処理による送信情報 IMAGE 0 画像付帯情報 0 撮像したN枚の画像データ(IMAGE 0 … IMAGE n)を機上で演算処理し、地上に降ろす画像データ(IMAGE)を作成。画像付帯情報には、演算前の各画像に対する撮像直前のセンサーテレメトリ等が記録されている。 IMAGE 1 画像付帯情報 1 : : : : IMAGE n 画像付帯情報 n 地上に送信されるデータは、共通ヘッダの付加された画像データ(IMAGE)とn個の画像付帯情報。共通ヘッダには、画像圧縮方法、演算対象となった画像のID情報等が記録されている。L1処理では、共通ヘッダの情報から、関係する画像付帯情報を取り出し、撮像時のセンサ状態を知り、FITSファイルにヘッダ情報として保存する。 機上演算 画像データ共通ヘッダ 画像付帯情報 0 画像付帯情報 1 画像付帯情報 n 画像付帯情報 n IMAGE 画像付帯情報 n ※観測プログラムの内容により各センサの一回の取得画像データ数は異なる。
FITS画像ヘッダ L1、L2データの画像フォーマットはFITS形式とする。 • プライマリヘッダはデータアーカイブ、ファイル情報のみ • IMAGE extension にて画像データを格納 • 個々の画像データにイメージデータ構造情報、観測情報、軌道・姿勢情報を付ける • ヘッダ情報は処理の時系列順に記載 • 高次のプロダクトでは、前のプロダクトで生成された情報を残す • データ操作の内容はHISTORYキーワードを用いて残す • 実行日時、実行者、利用プログラム、操作内容 • データ構造を示すキーワードはFITS Standard, Commonキーワードを使用 • 観測内容を示すキーワードは一部を除き独自キーワード • 独自キーワードの命名規則 • 衛星共通の運用データなど: “P_” で始める • SPICEカーネルを用いて計算した軌道情報など:”S_”で始める • 観測機器固有の情報は機器の名称を関したキーワード: • IR1 “I1_”, IR2: “I2_”, LAC: “LA_”, LIR, “LI_”, UVI: “UV_”
L1 File Format輝度値イメージFITSファイル プライマリデータ • プライマリデータ • ヘッダのみ • データアーカイブに関する情報 • 画像データ×1 • 画像データヘッダ • 画像サイズ情報 • 観測時刻(TI) • センサテレメトリ情報 • 画像データ • カウント値 (L1a) • 校正値 (L1b) プライマリデータヘッダ 画像データ 画像データヘッダ 画像データバイナリ
観測内容に関連するキーワード • 観測衛星名:TELESCOP [or 独自キーワード] • 観測機器名: INSTRUME • 観測開始時刻: P_SCCSC (TI), DATA-OBS(UTC) • 観測終了時刻: P_SCCEC (TI), DATA-END(UTC) • 露出時間: EXPOSURE • 観測波長: FILTER • 画像圧縮情報: 圧縮アルゴリズム、パラメータ • 画像統計値: 最大 DATAMAX、最小 DATAMIN • 画像サイズ • NAXIS1:画像第一方向サイズ • NAXIS2:画像第二方向サイズ • 画像切り出し情報 ※(キーワード未確定) • BINNING:ビニング数 • AX1_STRT: 画像第一方向の切り出し開始ピクセルナンバ • AX1_LAST: 画像第一方向の切り出し終了ピクセルナンバ • AX2_STRT: 画像第二方向の切り出し開始ピクセルナンバ • AX2_LAST: 画像第二方向の切り出し終了ピクセルナンバ • 各観測機器に固有の情報: 観測機器温度、観測モード、キャリブレーション等の情報 Ex. UV_CCDT(UVI CCD温度), UV_FILT(UVI フィルタ温度), UVI_CF01 (キャリブレーションに使用したファイル名)等 ※LAC の雷モードの場合、第一方向(時間)のデータサンプリング間隔情報が必須(キーワード T.B.D.)
L2 File Format輝度値イメージFITSファイル プライマリデータ • プライマリデータ • ヘッダのみ • データアーカイブに関する情報 • 画像データ×1 • 画像データヘッダ • 画像サイズ情報 • 観測時刻(TI) • センサテレメトリ情報 • 軌道情報 • ジオメトリ代表値情報 • 画像データ • 校正値 (L1b) プライマリデータヘッダ 画像データ 画像データヘッダ 画像データバイナリ
画像データ1 画像データ2 画像データヘッダ 画像データヘッダ 各画素緯度イメージバイナリ 各画素経度イメージバイナリ L2 File Formatジオメトリ情報FITSファイル プライマリデータ(ヘッダのみ) • プライマリデータ • ヘッダのみ • データアーカイブに関する情報 • 画像データ×8 • 画像データヘッダ • 画像サイズ情報 • 観測時刻、観測機器情報 • 源泉ファイル情報 • 画像データ • 画素中心について 1) 緯度 2) 経度 3)入射角 4) 出射角 5) 入射と出射の方位角の差 6)地方時の値 • 画素四隅について 1)緯度 2) 経度 プライマリデータヘッダ
軌道に関するキーワード • 軌道番号: S_ORBITN • 軌道離心率: S_ECCENT • 軌道傾斜角: S_INCANG • 軌道長半径: S_SEMIAX • 軌道昇交点経度: S_LONNOD • 軌道面近点引数: S_ARGPER • 近金点緯度・経度・高度: S_PERLAT, S_PERLON,S_PERALT • 近金点通過時刻:S_PERTIM • 近金点通過時金星太陽距離:S_SOLDIS
姿勢・その他のキーワード • 撮像時太陽直下点緯度・経度: • 撮像時探査機直下点緯度・経度・ローカルタイム: • 撮像時金星中心からの探査機距離: • 観測器方向ベクトル: S_INPNT1,S_INPNT2,S_INPNT3 • 天球座標情報: WCS(World Coordinates System)キーワードを使用することでかくピクセルの赤経、赤緯度を表現 • 最大解像度:S_MAXRES
FITSヘッダサンプル XTENSION= 'IMAGE ' / type of extension BITPIX = 16 / number of bits per data pixel NAXIS = 2 / number of data axes NAXIS1 = 1024 / length of data axis 1 NAXIS2 = 1024 / length of data axis 2 PCOUNT = 0 / number of parameters per group GCOUNT = 1 / number of groups EXTNAME = 'UVI-LEVEL2' / name of this HDU EXTVER = 0 / version of EXTNAME CTYPE1 = 'N/A ' / T.B.D. CTYPE2 = 'N/A ' / T.B.D. ORIGIN = 'P-C/UVI team' / Organization responsible for the data DATE = '2010-03-07T18:11:31' / Date of generation of this HDU DATE-OBS= '2006-12-27T19:57:35.987Z' / Date of the start of observation DATE-END= '2006-12-27T19:57:36.013Z' / Date of the end of observation TELESCOP= 'P-C ' / telescope used to acquire data INSTRUME= 'UVI ' / Identifier of the instrument OBJECT = 'N/A ' / Name of observed object BUNITS = 'COUNTS ' / data units DATAMAX = 7501 / Maximum data value DATAMIN = -1 / Minimum data value FILENAME= 'V0251_0002_UV2.IMG' / Original data COMMENT COMMENT ********************************************************* COMMENT ******* This is test data made from VEX/VMC data ******** COMMENT ******* for AKATSUKI data flow tests. ******** COMMENT ********************************************************* COMMENT COMMENT ******* UVI Observation Information(From Image Headder) ******* COMMENT EXPOSURE= 25.2 / Exposure time [sec] FILTER = 'VMC-UV ' / Filter name UVI_OBA = 'NORMAL ' / UVI CCD area UVI_CCDT= 11.4 / VMC CCD Temperature [C deg] UVI_FILT= 'N/A ' / UVI Filter Temperature [C deg] UVI_05V = 'N/A ' / UVI PS 5V Monitor [V] UVI_15V = 'N/A ' / UVI PS 15V Monitor [V] UVI_30V = 'N/A ' / UVI PS 30V Monitor [V] UVI_CFW = 365 / Center of the filter Wavelength [nm] UVI_FWHM= 15 / Band width of the filter [nm] COMMENT COMMENT ******* VMC Spacecraft Clock Information ******* COMMENT P_SCCSC = '1/0057614253.40861' / VEX S/C Clock Start Count P_SCCEC = '1/0057614253.42512' / VEX S/C Clock End Count HISTORY OPERATOR: Manabu YAMADA HISTORY DATE: 2010-03-07T18:11:31 HISTORY TASK: TASK: Generate FITS file. VMC2UVI Image Header Conversion. HISTORY SOFT: VMC2UVI.cpp program compiled at Mar 8 2010 03:11:27 COMMENT COMMENT ******* AKATSUKI Orbital Infomation ******* COMMENT S_ORBITN= 251 / AKATSUKI Orbit Number S_PERTIM= '2006-12-28T07:45:36.000Z' / AKATSUKI Periapsis time S_PERLON= 308.41 / AKATSUKI Periapsis Longitude [deg] S_PERLAT= 80.74 / AKATSUKI Periapsis Latitude [deg] S_PERALT= 260.18 / AKATSUKI Periapsis Altitude [km] S_INCANG= 89.98 / AKATSUKI Inclination Angle [deg] S_ECCENT= 0.84 / AKATSUKI Eccentricity S_LONNOD= 107.05 / AKATSUKI orbit plane lon of ascending node [deg S_ARGPER= 99.26 / AKATSUKI orbit plane argument of periapsis [deg S_SOLDIS= 1.08942E+08 / Range of sun from Venus body [km] S_SEMIAX= 39445.4 / AKATSUKI Semi-major axis [km] COMMENT COMMENT ****** BEGIN SPICE KERNELS ******** COMMENT NAIF0009.TLS, VEX_100106_STEP.TSC, VEX_ALL.BSP, DE405.BSP, VEX_V08.TF, COMMENT ATNV_P051109051109_00286.BC, DE403-MASSES.TPC, PCK00008.TPC, COMMENT VEX_VMC_V04.TI, VEX_VIRTIS_V03.TI, VEX_PFS_V00.TI, VEX_SOIR_V01.TI, COMMENT VEX_ASPERA4_V02.TI, COMMENT ****** END SPICE KERNELS ********** COMMENT HISTORY OPERATOR: Manabu YAMADA HISTORY DATE: 2010-03-10T05:16:57 HISTORY TASK: Make L2 FITS file. HISTORY SOFT: PC-L1toL2.cpp program compiled at Mar 10 2010 14:16:51
SPICE kernel IK 体制 責任者:中村 関係者:IR1: 大月, IR2: 中村, LIR: 福原, LAC: 星野, UVI: 山田 上流 なし 機能 PIが準備した観測機器毎の光学性能情報を提供するカーネルを作成。 カーネルに含まれる情報:基準座標系,視野中心の視線ベクトル,視野四隅の視線ベクトル,焦点距離,歪み情報(TBD)など 情報が更新された場合はファイル名ベース(TBD)でのバージョン管理を行う 下流 指定ディレクトリに配置し公開する
SPICE kernel FK 体制 責任者: 中村 関係者: 上流 なし 機能 衛星構体の座標系から観測機器などの個別要素の座標系までの相対関係を記述し,観測機器指向方向などの基礎情報を提供するカーネルを作成する。 カーネルに含まれる情報:座標系の名称,基準となる座標系の名称,座標系間の相対関係(回転角など) 情報が更新された場合はファイル名ベース(TBD)でのバージョン管理を行う 下流 指定ディレクトリに配置し公開する
SPICE kernel SPK 体制 責任者: 中村 関係者: 上流 軌道グループ 機能 軌道グループから提供される情報を、SPICEカーネルのSPKファイル形式に変換する。 変換にはSPICE標準ツールのmkspkを用いる 必要に応じて以下の処理を行う:源泉データのフォーマット変換,データの妥当性チェック,長期データのマージ 下流 指定ディレクトリに配置し公開する
SPICE kernel SCLK 体制 責任者: 中村 関係者: 上流 基準時刻ファイルをSIRIUSから SDTPを使って取得 機能 基準時刻ファイルおよびプロジェクト固有の情報を収集し、衛星時刻(TI)をUTCに変換するための SCLK カーネルを生成する。 必要に応じて以下の処理を行う:源泉データのフォーマット変換,データの妥当性チェック,長期データのマージまたは平滑化・間引き 下流 指定ディレクトリに配置し公開する
SPICE kernel CK 体制 責任者: 中村 関係者: 上流 HKテレメトリをSIRIUSから SDTPを使って取得 機能 HKテレメトリおよびプロジェクト固有の情報を収集し、各観測機器の方向情報が収められたCK カーネルを生成する。 変換にはSPICE標準ツールのmsopck を用いる 必要に応じて以下の処理を行う:源泉データのフォーマット変換,データの妥当性チェック,長期データのマージ 下流 指定ディレクトリに配置し公開する