Programmable & Autonomous Humanoid Robot ”Robovie-M”
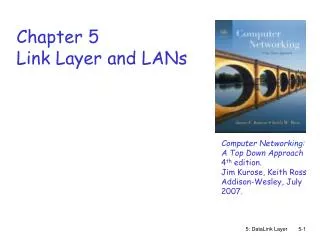
Programmable & Autonomous Humanoid Robot ”Robovie-M” Platform for Research and Development “ Robovie-M” Overview Height:290mm/approx. 1feet Weight: approx. 1.9kg approx. 4.2 pound Feet 6 DOF x 2 Arm 4 DOF x 2 Waist 1 DOF Shoulder 1 DOF Total 22 DOF

Programmable & Autonomous Humanoid Robot ”Robovie-M”
E N D
Presentation Transcript
Programmable & Autonomous Humanoid Robot ”Robovie-M”
Platform for Research and Development “Robovie-M” Overview Height:290mm/approx. 1feet Weight: approx. 1.9kg approx. 4.2 poundFeet 6 DOF x 2 Arm 4 DOF x 2 Waist 1 DOF Shoulder 1 DOF Total 22 DOF CPU H8 16MHz Battery NiMH 6V 2000mAh The robot autonomously gets up after failing by monitoring the tilt sensor. Users can control with a wireless controller.
Feature 1 High flexibility and unique joint arrangement realize higher mobility • OmniHead is very small and light weight, which the height is 290mm. The 22 DOF will allow for highly flexibility. In addition to the flexibility of the shoulder and waist, it has high mobility by placing an axis on bottom of robot’s feet. • The shoulder generates dynamic movements of the upper torso. • The waist takes important role when getting up. • The bottom of the robot’s feet improves the movement of taking turn. Shoulder 1 DOF Waist 1 DOF Arm 4 DOF x 2 Feet 6 DOF x 2
Feature 2 Original CPU board has made the robot small The ultra-slim CPU board installed on the robot is originally developed with a unique design. Although other robots has a backpack for carrying a CPU board, our robot dose not need a backpack since the CPU board is small enough Battery The battery and CPU board are built in the robot body. We’ve carefully designed the light and small robot. CPU board
Feature 3 Simple motion programming The software which ATR Intelligent Robotics and Communications Laboratories enhances users’ development of robot control program. The user can quickly make the robot motions by using the simple software interface.
Example of Various Motions Getting up from falling down Throwing a ball Balancing with one leg Walking Doing a handstand Kicking