Download
1 / 13
500 likes | 1.33k Views
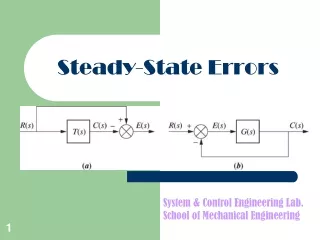
Steady-State Error. M. Sami Fadali Professor of Electrical Engineering University of Nevada. Error. Assume stability for the limit to exist. Steady state practically reached after (3-5) = largest time constant of the system. Error Block Diagram. Unity Feedback. n th order, type l.

E N D
Steady-State Error M. Sami Fadali Professor of Electrical Engineering University of Nevada
Error • Assume stability for the limit to exist. • Steady state practically reached after (3-5) • = largest time constant of the system
Unity Feedback nth order, type l Error depends on input & type number of system.
Input Amplitude Scaling • Error is scaled if input is scaled. • Table for unity feedback assumes unit input. • For amplitude A 1, multiply all error expressions by the input amplitude A.
Percentage Error • Expressed as a percentage of the input amplitude. • Unaffected by input scaling.
Unity vs. Nonunity Feedback • Nonunity feedback: get the steady-state error using the closed-loop transfer function T(s). • Unity feedback: use system type and error constants. • Type 0, use position error constant Kp (step) • Type 1, use position error constant Kv (ramp) • Type 2, use position error constant Ka (parabolic)
Error Due to Disturbance • Output due to disturbance is ideally zero. • All output due to disturbance is error. • The total error includes: tracking error and error due to disturbance. • For linear systems, use superposition.
Steady-State Error • For unity feedback systems, we can use error constants to calculate eR()