Download
1 / 6
60 likes | 497 Views
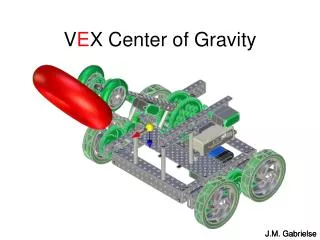
Center of Gravity. The RCX is, by far, the heaviest component of your robot. Therefore, it should be well positioned for the robot to have good balance. Good. Bad!. Center of Gravity. There are two main concepts in understanding balance.

E N D
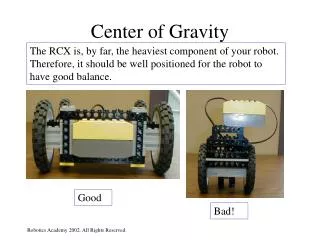
Center of Gravity The RCX is, by far, the heaviest component of your robot. Therefore, it should be well positioned for the robot to have good balance. Good Bad!
Center of Gravity There are two main concepts in understanding balance. 1) The Center of Gravity (or Center of Mass) is the single point on an object where all of its weight is assumed to be located. For the RCX, the Center of Gravity can be assumed to be directly in the center of the brick.
Center of Gravity 2) The Support Polygon is the “base” of the robot, which is the polygon that is formed by its wheels. Rectangle Triangle Line (not too stable)
Center of Gravity For the most stable robot, its Center of Gravity should be as close to the center of its Support Polygon as possible. This robot tips over because the Center of Gravity is outside of the Support Polygon.
Center of Gravity The height of the Center of Gravity also affects balance. Even though the center of the RCX is within this robot’s Support Polygon, it only takes a tiny push to the side for the Center of Gravity to move outside of the Support Polygon.
Center of Gravity Why is this robot bad? Why is this robot good? The RCX is low and well centered within the support polygon. The RCX is high and barely inside the support polygon.