Artificial Muscle
Artificial Muscle. Kori Brabham Misti Marr Andy Smith Paul Lee. Natural vs. Artificial Muscle. What does a natural muscle do? It is a contractile organ. It consists of fibers which “actuate” force and motion in response to nervous stimulation. How does it work?

Artificial Muscle
E N D
Presentation Transcript
Artificial Muscle Kori Brabham Misti Marr Andy Smith Paul Lee
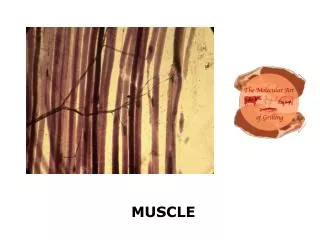
Natural vs. Artificial Muscle • What does a natural muscle do? • It is a contractile organ. • It consists of fibers which “actuate” force and motion in response to nervous stimulation. • How does it work? • Muscles contract by the chemo-mechanical action of the proteins actin and myosin. • Joints of the body are arrayed such that they comprise muscles which oppose each other.
Natural vs. Artificial Muscle • How can we develop replacements for the natural muscle? • Develop biomimetic actuators. • Emphasis on implantable technologies (not on the the forefront now). • What do we have to work with? • Electrical/pneumatic servos (robotic limbs, late 1940’s-present). • New materials. • Synthetic polymers • Carbon
What constitutes a muscle? • Any system or combination of sub-systems can be considered a “muscle”: • hydraulic/pneumatic cylinder. • electromagnetic servo. • biological muscle tissue. • In short, anything which accomplishes actuation under the command of a stimulus. • Muscles primarily exert energy (ATP) to bring about: • motion, acceleration (v/ t or 2x/ t2). • force application (F=m.a).
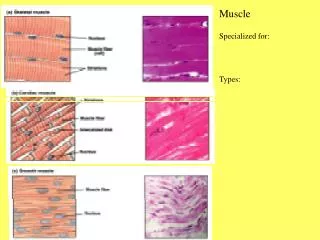
Muscles Revisited • Muscle cells are highly specialized for contraction. • ONLY contract and relax • Abduction and adduction • Actin and myosin vary in amounts and configuration, depending on cell function.
Three types • Skeletal – voluntary and striated • Cardiac – involuntary, striated, and branched • Smooth – involuntary and unstriated
The Design of Natural Muscle • Muscles are simply transducers • They change the chemo-electric signal from nerves to mechanical energy. • Artificial muscles should be similar in resilience and in the ability to produce large actuation strains • http://www.unm.edu/~amri/protect/
Brief Timeline • 1619 - Descartes postulated that sensory impulses activated muscle (reflection) • 1780 - Galvani noticed frog muscles would contract with electrical apparatus
Brief Timeline (cont’d) • 1968 – Rubber artificial muscle • Involved several thread running along a longitudinal axis • Compressed air is injected
Brief Timeline (cont’d) • 1968 - Model Postural Control • A biped walking machine is required to maintain it’s balance while standing and walking
Artificial Muscle—An Overview • Many types of artificial “muscle”. • McKibbin muscle actuators • Inflatable air tubes, delivering large force at a low frequency. • PAN-chemically stimulated by pH change. • Electrically Stimulated “Tissues” • IPMC • Solenoids (not presented) • Piezo-active polymers and ceramics (not presented)
History • First developed in the 1950's by American physician Joseph L. McKibben • originally intended to actuate artificial limbs for amputees • More recently was commercialized in the 1980's by Bridgestone Rubber Company of Japan • patented and called “Rubbertuator” • Presently the Shadow Robot Group of England manufactures these actuators for robotic applications
How it’s made • Consists of an internal bladder • Bladder is covered by a braided mesh shell • Attached at either end to tendon-like structures
How it works • Internal bladder is pressurized • Bladder expands in a balloon-like manner against the braided shell • Shell constrains the expansion to maintain a cylindrical shape • As the volume of the bladder increases due to the increase in pressure, the actuator shortens and produces tension
High force to weight ratio Lightweight Low Cost Smooth Size availability Flexible Powerful Damped Effective Advantages of the McKibben Artificial Muscle
Comparison to biological muscle • Force-length properties are reasonably close • Force-velocity properties are not close • a device called a hydraulic damper that operates in parallel with the McKibben muscles has been created • McKibben muscles are attached to a spring-like device that simulates the tendon properties and energy storage of a real muscle
How it’s made • Composed of a perfluorinated ion exchange membrane • Consist of a polymer matrix that is coated on the outer surface with platinum in most cases (silver and copper have also been used) • coating aids in the distribution of the voltage over surface • Made into sheets that can be cut into different shapes and sizes as needed
How it works • Uses electricity (electrodes, conductors, etc.) to operate • A circuit is connected to surface to produce voltage difference, causing bending • Strips can bend and flap dramatically which allows movement
Advantages of IPMC • Light • Compact • Driven by low power and low voltage • Large strain capability
Comparison to biological muscle • High fracture tolerance • Large actuation strain • Inherent vibration damping • Responds to electricity with elasticity and responsiveness similar to those shown to biological muscle
Nanotube Artificial Muscle • Invented by Max Plank Institute, produced by AlliedSignal. • Based on Carbon nanotubes (bucky tubes). • Sub-microscopic Carbon sheets (formed into tubes) filled with electrolytes.
Nanotube Artificial Muscle (cont’d) • When a voltage is applied the sheets contract to do work. • Possible limitation: electrically actuated. • Being investigated by Defense Advanced Research Projects Agency (DARPA) as “bucky paper”.
Polyacrylonitrile (PAN) • Combination of gel and plastic. Tough. • Contracts under pH changes. • Contraction occur in 20 ms to a -20% strain. • Very similar to human muscle in speed, exceeds human muscle in max force per cm2 (2x).
Polyacrylonitrile (PAN) (cont’) • Must be surrounded by solutions in latex tubes. • Some models have been developed which simulate muscle movement. • University of NM project.
Electro-active Muscle Transducers • Uses compliant electrodes to electrically stimulate electro-active elastomeric materials. • Produce strains in excess of 100%, and pressures greater that 100 psi. • Spherical joints have been developed based on the actuator. • Developed by SRI International, Inc.
Electro-active Muscle Transducers (cont’d) • AKA Electrostrictive or dielectric elastomer. • Exhibit a mechanical strain when subjected to an electrical field. • Striction capability exceeds piezoelectric ceramics. • Most common are PMMA-based. • Produce a positive force/expansion. • Use: tiny robotic muscles.
A Novel Use for AM • Smart implants with tiny perforations that contain a pharmaceutical, plugged by artificial muscles. • The implant has tiny sensors which sense blood concentrations of certain chemicals.
A Novel Use for AM (cont’d) • The artificial muscle then will shrink to allow a drug to pass freely. • When concentrations of the sensed chemical rises in the blood, the muscle then relaxes to plug the holes a gain.
Honorable Mention Replacement: Prosthetic Limbs • Started as passive replacements to fill clothing or act as support. • Archeological evidence of prostheses in ancient India and Egypt--Queen Vishpla, Elis. • Infection and blood loss. • 1600’s-1800’s • Great increase in health technology: styptic antibiotics, anesthetics, blood clotting chemicals. • Prosthetic units were developed with lighter weight and greater articulation (motion learned and controlled by amputee). • 1940’s-1980’s – Emphasis on actuation. • 1980’s-Present – Emphasis on realism.
Replacement: Prosthetic Limbs (cont’d) • Number of Companies that specialize in prosthesis/orthotics: • North Shore Orthotics-Prosthetics, Inc. • Ohi, SCOPe, many others. • Limb replacements are actuated: • By other existing muscles directly. • By EMG generated by nearby existing muscles • Balance.
Artificial Muscle Applications in Robots
Types of Robots • Miniature robots • Wall climbers • Exploring rovers
Miniature Robots • Submersible bots with plastic muscles • Ability to someday pick up single cells • Positive and negative ions shrink and swell the polymer
Wall Climbers • Air Rubbertuator • Capable of difficult inspections • Aircraft • Bridges • Nuclear power plants • Obstacles, inclines, stairs, vertical movement.
Robots in Space • Ability to probe, dig, photograph and analyze • No gears or complex mechanical systems • Lighter and less complex robots • Smaller • Not sensitive to dust
Capabilties • Grasping • Wiping • Muscle groups working together
Grasping • Electric charge applied to plastic ribon • Charged particles pushed to one side lengthens that side
Wipers • Two-way wiping motion produced • Applications onto cameras or sensors
Muscles Working Together • Creates more than one motion • Bionic men and women??? • Could replace human muscles
Legs and Wheels • Able to handle most terrain • Durable • Reliable • Not as good as four legs
A Way of the Future • Cheap • Durable • Lightweight • Conserve Power
References • Electroactive Polymer Actuators webpage • Artificial Muscle Research Institute • SRI International, Inc. • Opthalmatronix, Inc. • Ohio State University • www.spacedaily.com • Max Planck Society • University of New Mexico -- cape.uwaterloo.ca • BBC News • Science Daily • Discovery Channel