Discussion
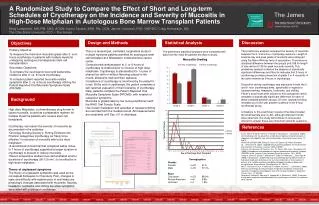
Biomechanics Laboratory KINETIC ANALYSIS OF FORCE DISSIPATION CHARACTERISTICS IN MOUNTAIN BICYCLES Tyler Cluff, Joel Roy & D. Gordon E. Robertson, PhD, FCSB School of Human Kinetics, University of Ottawa, Ontario, Canada Results

Discussion
E N D
Presentation Transcript
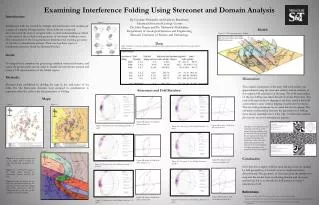
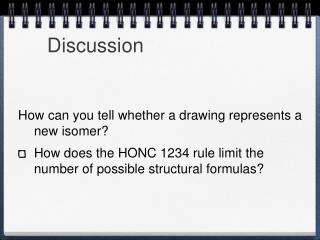
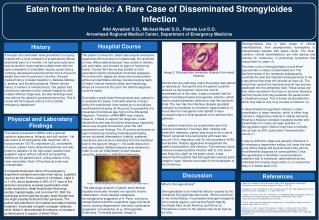
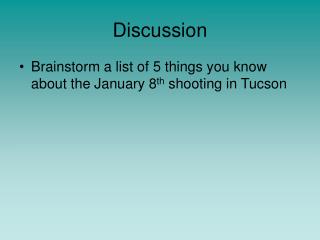
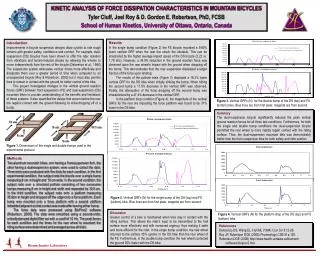
Biomechanics Laboratory KINETIC ANALYSIS OF FORCE DISSIPATION CHARACTERISTICS IN MOUNTAIN BICYCLES Tyler Cluff, Joel Roy & D. Gordon E. Robertson, PhD, FCSB School of Human Kinetics, University of Ottawa, Ontario, Canada Results In the single bump condition (Figure 2) the FS bicycle recorded a 9.90% lower vertical GRF when the rear tire struck the obstacle. This can be interpreted by the higher average impact speed of the DS bicycle (2.22 vs. 1.78 m/s). However, a 39.9% reduction in the ground reaction force was observed upon the rear wheel’s impact with the ground when dropping off the bump. This demonstrates that the rear suspension dissipated a larger fraction of the force upon landing. The results of the pothole trials (Figure 3) displayed a 16.3% lower vertical GRF for the DS bike when initially striking the bump. When hitting the second bump a 17.5% decrease in the vertical GRF was observed. Finally, the attenuation of the force dropping off the second bump was characterized by a 47.4% decrease in the vertical GRF. In the platform drop condition (Figure 4), the magnitude of the vertical GRFs for the rear tire impacting the force platform was found to be 31% lower in the DS bike. Introduction Improvements in bicycle suspension designs allow cyclists to ride rough terrains with greater safety, confidence and comfort. For example, dual- suspension (DS) bicycles have been shown to offer the rider isolation from vibrations and terrain-induced shocks by allowing the wheels to move independently from the rest of the bicycle (Delorenzo et al., 1994) The suspension system attenuates vertical forces more effectively and dissipates them over a greater period of time when compared to an unsuspended bicycle (Roy & Robertson, 2000) but it must also permits tires to remain in contact with the ground for better control of the bike. This project investigated changes in the vertical ground reaction forces (GRF) between front-suspension (FS) and dual-suspension (DS) mountain bikes to provide understanding of the benefits and limitations of these systems. It also quantified the delays that occurs before the rear tire regains contact with the ground following its initial dropping off of a bump. Figure 3. Vertical GRFs (N) for the double bump of the DS (top) and FS (bottom) bike. Blue lines are from first plate; magenta are from second. Summary The dual-suspension bicycle significantly reduced the peak vertical ground reaction forces for all three test conditions. Furthermore, for both the single and double bump conditions the dual-suspension bicycle permitted the rear wheel to more rapidly regain contact with the riding surface. Thus, the dual-suspension mountain bike was demonstrably better than the front-suspension bike for both safety and rider comfort. Figure 1. Dimensions of the single and double bumps used in the experimental protocol. Methods Two aluminum mountain bikes, one having a front-suspension fork, the other having a dual-suspension system, were used to collect the data. Three tests were conducted with five trials for each condition. In the first experimental condition, the subject rode the bicycle over a single bump measuring 8 cm in height and 10 cm wide. In the second condition, the subject rode over a simulated pothole consisting of two successive bumps measuring 8 cm in height and width and separated by 30.5 cm. In the third condition, the subject rode onto a platform measuring 35.6cm in height and dropped off the edge onto a force platform. Each bump was mounted onto a force platform with a second platform imbedded adjacent so that contact was made after leaving either bump. The force data were processed using BioProc2 software (Robertson, 2006). The data were smoothed using a second-order, critically-damped digital filter set with a cutoff of 10 Hz. The peak forces for each condition and the times for the rear wheel to recontact the riding surface were determined and averaged across all trials. Figure 2. Vertical GRFs (N) for the single bump of the DS (top) and FS (bottom) bike. Blue lines are from first plate; magenta are from second. Discussion Greater control of a bike is maintained when tires stay in contact with the riding surface. This allows the rider’s input to be transmitted to the trail surface more effectively and with increased urgency, thus making it safer and more efficient for the rider. In the single bump condition, the rear wheel returned to the surface 35% quicker in the DS bike than the rear wheel of the FS. Furthermore, in the double bump condition the rear wheel contacted the ground 25% faster with the DS bike. Figure 4. Vertical GRFs (N) for the platform drop of the DS (top) and FS (bottom) bike. References Delorenzo DS, Wang EL, Hull ML (1994) Cycl Sci 3:12-26. Roy JP, Robertson DGE (2000) Proceedings CSB XI p.125. Robertson DGE (2006) http://www.health.uottawa.ca/biomech /software/bioproc2.htm.