Download
1 / 38
440 likes | 1.1k Views
+. _. G ( s ) Plant + compensator. Actuator. The Problem of Absolute Stability. Motivation. Assume that the actuator is linear. Hurwitz sector. Aizerman conjecture. Assume now that the actuator is nonlinear, for instance, a saturator. This question was posed by M.A. Aizerman in 1940’s.

E N D
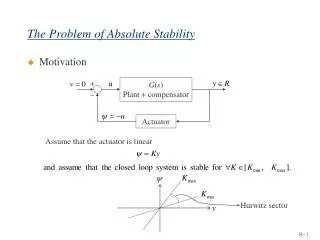
+ _ G(s) Plant + compensator Actuator The Problem of Absolute Stability • Motivation Assume that the actuator is linear Hurwitz sector
Aizerman conjecture Assume now that the actuator is nonlinear, for instance, a saturator This question was posed by M.A. Aizerman in 1940’s. Aizerman conjecture :
Kalman conjecture Kalman conjecture : A answer was first proposed by A.I. Lurie. Popov, Kalman, Yakubovich and others contributed to the solution. Sometimes this problem is called the Lurie problem. N.B :
Problem Formulation Plant Assumptions
Problem (Continued) We can rewrite the sector condition as
Problem (Continued) Consider the decentralized feedback Define and Then p-dim sector condition is symmetric positive definite diagonal matrix
Def : Problem (Continued) - Generalization for centralized case Introduce Then where again
Notation Define : Problem (Continued) Consider again
Remarks Remarks • Absolute stability not another type of stability • Absolute stability gives a measure of robustness • No constructive necessary and sufficient conditions have beenfound as yet. The main tool is the Kalman-Yakubovich-Popov Lemma.
Solution • Approach to the solution To find out conditions of absolute stability Find a Lyapunov function good for a continuum of systems – all with nonlinearities in the sector Two types of Lyapunov functions are typically used. Here the conditions are less conservative (Popov Criterion).
Circle Criterion • Circle Criterion
K – Y – P Lemma (Continued) Lemma :
0 G(s) Generalization To eliminate the restriction on A to be Hurwitz loop transformation (pole shifting) G(s)
Generalization (Continued) Obviously
Generalization : Case 1
Popov Criterion • Popov Criterion Popov
Theorem Theorem :
K can be as large as possible Finite sector Theorem(Continued) Graphically