Using Infrared and Touch Sensors on the OCTARM VI Robot
Using Infrared and Touch Sensors on the OCTARM VI Robot Robert Clarke, SURE 2006 Faculty Advisor: Dr. Ian Walker Introduction

Using Infrared and Touch Sensors on the OCTARM VI Robot
E N D
Presentation Transcript
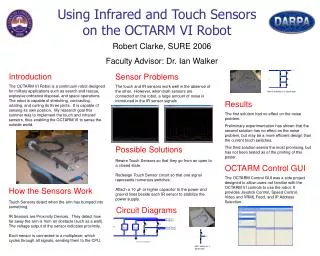
Using Infrared and Touch Sensors on the OCTARM VI Robot Robert Clarke, SURE 2006 Faculty Advisor: Dr. Ian Walker Introduction The OCTARM VI Robot is a continuum robot designed for military applications such as search and rescue, explosive ordnance disposal, and space operations. The robot is capable of stretching, contracting, rotating, and curling its three joints. It is capable of sensing its own position. My research goal this summer was to implement the touch and infrared sensors, thus enabling the OCTARM VI to sense the outside world. Sensor Problems The touch and IR sensors work well in the absence of the other. However, when both sensors are connected on the robot, a large amount of noise is introduced in the IR sensor signals New 3 switches to 1 signal style Results The first solution had no effect on the noise problem. Preliminary experimentation has shown that the second solution has no effect on the noise problem, but may be a more efficient design than the current touch switches. The third solution seems the most promising, but has not been tested as of the printing of this poster. Possible Solutions Rewire Touch Sensors so that they go from an open to a closed state. Redesign Touch Sensor circuit so that one signal represents numerous switches. Attach a 10 µF or higher capacitor to the power and ground lines beside each IR sensor to stabilize the power supply. OCTARM Control GUI The OCTARM Control GUI was a side project designed to allow users not familiar with the OCTARM VI controls to use the robot. It provides Joystick Control, Speed Control, Video and VRML Feed, and IP Address Selection. How the Sensors Work Touch Sensors detect when the arm has bumped into something. IR Sensors are Proximity Devices. They detect how far away the arm is from an obstacle (such as a wall). The voltage output of the sensor indicates proximity. Each sensor is connected to a multiplexer, which cycles through all signals, sending them to the CPU. Circuit Diagrams Current Circuit Diagram Old 1 switch to 1 signal style