Brushless Motors
Brushless Motors. A servosystem is capable of transforming any mathematical function into a mechanical movement it can replace mechanical elements, such as cams and cam shafts, indexing gears, differentials, etc. A servosystem consists of a servomotor with its control unit.


Brushless Motors
E N D
Presentation Transcript
A servosystem is capable of transforming • any mathematical function • into a mechanical movement • it can replace mechanical elements, such as cams and cam shafts, indexing gears, differentials, etc. • A servosystem consists of a servomotor with its control unit. • Servosystems can be used for: • Positioning; the position, linear or angular, follows a predetermined position function. • Speed control; the motor speed follows a • predetermined speed function. • Torque control; the torque of the motor follows a • predetermined acceleration function. • Hybrid control; the system alternates between • different kinds of control
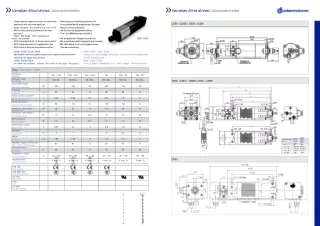
The servomotor, which is a permanently magnetized brushless AC motor, is a • relatively new type of motor. 24 slots 2 rotor poles
Electro-Magnetic Flux Distribution 21 slots 8 rotor poles
Brushless Solution Pros&Cons: • Velocity (no sparks at the commutator) • Efficiency (Torque/Inertia) • Weight • Dimensions • Thermical Dissipation • Acoustic Noise • Maintenance • MTBF Disadvantages: Cost
Warm Cold Warm • Only the stator is warm. Warm • Rotor and commutator are warm Warm Heiß Warm • Both rotor and stator are warm Thermical Behaviour 1. BL-Servo with MP 2. DC-Servo with MP 3. AC-Servo (ASM squirrel cage)
Two brushless motors types exist • (they differ in stator windings, permanent magnets lay-down, statoric field wave shape): • AC brushless: • with sinusoidal field (fcem) • DC brushless: • with trapezoidal field (fcem)
Permanent Magnets (PM) types: • Ferrite: low cost, • low Kt, torque loss: 0.2%/K, • demagnetization temperature: 150C • Samarium Cobalt (Sm2Co17): high cost, • high Kt, torque loss: 0.04%/K, • demagnetization temperature: >150C • (example: Danaher HD series, Rockwell MPG series) • Neodimium Iron Boron (NdFeB): medium cost, • higher Kt, torque loss: 0.09%/K, • demagnetization temperature: >150C • (example: Danaher HR series, Rockwell H, Y, 1326, MPL series)
E [kJ/m3] 400 Nd Fe B 300 Sm Co 200 Steel Al Ni Co Ferrite 100 Year 0 1860 1880 1900 1920 1940 1960 1980 2000 Magnetism • NdFeB (vs. SmCo) • higher energy content • worse thermical reversibility • lower Curie temperature • lower cost • corrosion (not present with SmCo) • bigger resistance in W, • that in turn limits eddy currents
density [g/cm^3] Curie Temp. [°C] Br temp. coeff.[% 1/°C] Sm2 Co17 8,3 825 -0,03 (20°C ÷ 200°C) Nd Fe B 7,4 315 -0,1 (20°C ÷ 150°C) SECo5 Campo coercitivo JHc [kA/m] 500 1000 1500 2000 2500 SECo5 qualitàspeciali (Field that can demagnetize the magnet) NdFeB Sm2Co17 50 100 150 200 250 300 350 400 Max Energetic Product (B*H)max [kJ/m^3] Temperature that causes para-magnetic behaviour (i.e. weak magnetisation) SmCo vs. NdFeB
The permanent magnets lay-out on the rotor surface depends on: AC or DC brushless, Kt, Cogging Torque (coppia di impuntamento).
PTC Resistor • Positive Thermal Coefficient resistor,used as a sensor • inside the motor, • in order to stop the driver/controller • in case of too-high temperature (before to burn the motor)
Servo Motor Shapes and Air Cooling
Direct Drive Solution • Problem: • Motor shaft elastical torsion (i.e. its flexibility): • resonance frequency • limited band-width • low gains in the control loop • poor kinematic performances
Direct Drive Solution (cont’d) • Possible Solutions: • Digital Filters (only for constant resonance frequencies) • High Stiffness Motors (a high inertia would not solve the problem) • Torque Motors (Motori Coppia) with: • low velocity • high stiffness • they don’t need gearboxes (i.e. they are direct-drive)
Direct Drive Solution (cont’d) • Once solved the resonance frequency problem, the control loop gains can be increased and thus a good accuracy in the position sensor becomes mandatory: • Resolver: • 6 arc min = 0.1 degrees • SinCos Encoder: • 0.01 arc sec = 2.8E-6 degrees • or 1nm for linear encoders (righe ottiche)
Resolver • Characteristics: • linearity: 0. 1 - 0.5% • resolution: 0. 1 - 0.5° • sensitivity: 5 - 10mV/° (Vref =20V) • frequency: 20KHz
Resolver (cont’d) • Pro • absolute in one turn • low cost • robust • Cons • sinusoidal 20KHz reference voltage • non-linear output • brushes in some (old) versions • It has been the standard position sensor on brushless motors
Encoder (cont’d) • Encoder types: • Absolute • Battery Back Up • One-Turn Absolute • Multi-Turn • Incremental • SinCos (resolver output, encoder design, precise as an encoder) e.g.: Stegmann mounted on Rockwell MPL motors
Degree of Protection • IPXY (e.g.: IP65) • Digit 1 (X): Solid Objects Protection • 0 Non Protected • 1 Protected against solid objects > than 50 mm • 2 Protected against solid objects > than 12 mm • 3 Protected against solid objects > than 2.5 mm • 4 Protected against solid objects > than 1 mm • 5Dust Protected • 6Dust Tight • Digit 2 (Y): Water Protection • 0 Non Protected • 1 Protected against dripping water • 2Protected against dripping water • when tilted to worse case opening • 3 Protected against spraying water • 4 Protected against splashing water • 5 Protected against waterjets • 6 Protected against heavy seas • 7 Protected against the effects of immersion • 8 Protected against submersion