Download
1 / 34
340 likes | 547 Views
Road to MeerKAT KAT-7 DBE. Alan Langman. meerKAT. Overview . Objectives of meerKAT Location Location Location MeerKAT Engineering Specification Prototypes to MeerKAT KAT-7 Mention Control Interface Other research Questions?. KAT/MeerKAT Objectives.

E N D
Road to MeerKATKAT-7 DBE Alan Langman
Overview • Objectives of meerKAT • Location LocationLocation • MeerKAT Engineering Specification • Prototypes to MeerKAT • KAT-7 • Mention Control Interface • Other research • Questions?
KAT/MeerKAT Objectives • Build a world class radio telescope (up to 80 dishes) • Choose a frequency range that is likely to have high science impact. • Commission a 7 dish system from end of 2009, engineering risk mitigation and do some early science. • Train a new generation of scientists and engineers who are capable to participate in large international projects, such as the SKA. • Provide an excellent facility for local and international scientists. • Implement mission-driven innovation to mobilise industry, academia and research fraternity. • SKA pathfinder
MeerKAT DBE Functions • Imaging (continuum + spectral line) • Beamforming(continuum + spectral line) • Pulsar Timing • Transient Detection • Baseband recording • VLBI • (and more … scope is still under revision)
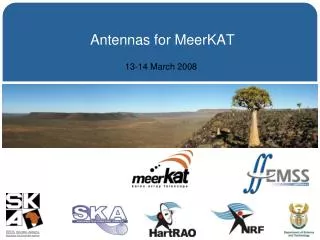
Dishes and Feeds: 80 x 12 m dishes, each equipped with a single pixel prime focus feed Key interfaces Optical RF links: 80 x 2 optical links (80 dishes, 2 polarisations) Digital Receiver Station Controller (Karoo) Front end station processor Station data: High speed, large data volume, long distance data transfer Karoo Station to off-site data processing facility. Back end station processor Operations Centre (Cape Town) Station data: Distribution internationally, typically over TCP/IP. User (Scientist) Internet access What is the KAT/MeerKAT?
The prototyping phases Same site in the Karoo – 2009 onwards On the proposed SKA site in Karoo – 2008 onwards MeerKAT roll-out & commissioning KAT-7 construction & commissioning Current – at HartRAO Experimental development model (XDM) Current – at SAAO Completed Phased Experimental Demonstrator (PED) 4x3x2 FPA
First extra-galactic object recorded by XDM – 17/07/2007 Drift scan across Cygnus A
KAT-7 7
MeerKAT DBE Functions • Imaging (continuum + spectral line) • Beamforming(continuum + spectral line) • Pulsar Timing • Baseband recording • VLBI
katADC Requirements • The katADC shall include an E2PROM to store configuration information. • The katADC shall operate from 50MHz to 1GHz (goal 1.5GHz). • The katADC shall sample data with more than 6.5 ENOB over the full operating frequency range. • The katADC shall have a 50 ohm termination on the input, switchable via a suitable RF switch. • The katADC shall have 30dB RF gain control • The katADC shall have an onboard PLL clock generator. • The katADC shall have RFI shielding.
Gateware/Firmware • 100% CASPER tools • Developed Board Support Package for ROACH • Integrated into toolchain • U-boot port on board • Ready for ROACH
Control / Monitoring • Control interface are lines of text • Similar to tinysh, but with two differences: • Syntax somewhat more formal, more amenable to machine parsing • Not only set and get commands – commands defined for application domain (eg: start a data capture) • In concept similar to a shell, but also SMTP, IMAP, POP, FTP
Implementation • Runs out of FPGA blockrams on PPC • Control protocol runs over serial port • Multiple simultaneous data products over network interfaces (100Mbit, 10Gbit): • Histograms (2 * 256 bins) • Radiometers (2 * integrated power value) • Spectrometer (1024 channels, IQUV integrated) • Raw (2 * 1024 complex values)
Datastream control • Create and destroy streams • Set up parameters for data products • Start and stop data streams • Data transfer • High speed data products emitted autonomously by gateware over 10Gbit • Lower bandwidth data products transferred by processor via 100Mbit interface
Example Command • Broadcast histogram data for 15 seconds: • ?capture-create stream1 • ?capture-source stream1 hist • ?capture-destination stream1 xdp1:192.168.20.255:7002 • ?channel-dump-rate stream1 4 • ?capture-start stream1 1194508376 • ?capture-stop stream1 1194508391 • ?capture-destroy stream1
Other control and monitoring • Set time • Configure network interfaces • Dump and restore settings to survive reprogramming • Report log events • ...
www.ska.ac.za www.kat.ac.za www.hartrao.ac.za