Download
1 / 1
10 likes | 118 Views
e-DOTS - An Indoor Distributed Tracking System Dr. Rajeev Raje, Dr. Mihran Tuceryan, Ryan Rybarczyk { rraje , tuceryan , rrybarcz }@ cs.iupui.edu. Mission. e -DOTS. Framework. Approach.

E N D
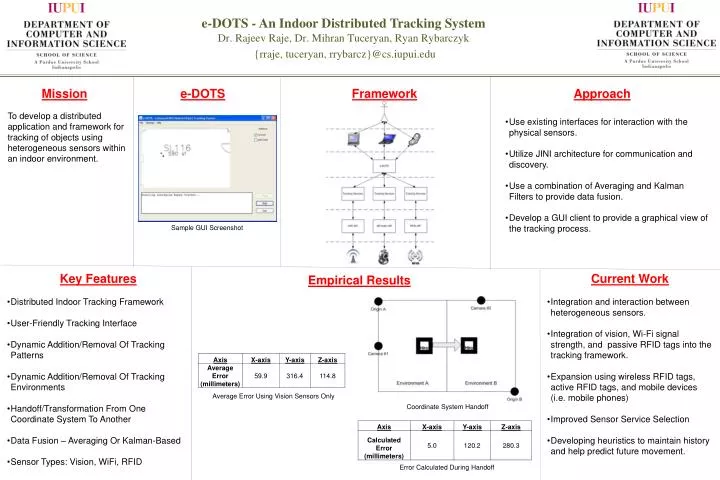
e-DOTS - An Indoor Distributed Tracking System Dr. Rajeev Raje, Dr. Mihran Tuceryan, Ryan Rybarczyk {rraje, tuceryan, rrybarcz}@cs.iupui.edu Mission e-DOTS Framework Approach To develop a distributed application and framework for tracking of objects using heterogeneous sensors within an indoor environment. • Use existing interfaces for interaction with the physical sensors. • Utilize JINI architecture for communication and discovery. • Use a combination of Averaging and Kalman Filters to provide data fusion. • Develop a GUI client to provide a graphical view of the tracking process. Sample GUI Screenshot • Key Features • Distributed Indoor Tracking Framework • User-Friendly Tracking Interface • Dynamic Addition/Removal Of Tracking Patterns • Dynamic Addition/Removal Of Tracking Environments • Handoff/Transformation From One Coordinate System To Another • Data Fusion – Averaging Or Kalman-Based • Sensor Types: Vision, WiFi, RFID • Current Work • Integration and interaction between heterogeneous sensors. • Integration of vision, Wi-Fi signal strength, and passive RFID tags into the tracking framework. • Expansion using wireless RFID tags, active RFID tags, and mobile devices (i.e. mobile phones) • Improved Sensor Service Selection • Developing heuristics to maintain history and help predict future movement. Empirical Results Average Error Using Vision Sensors Only Coordinate System Handoff Error Calculated During Handoff