Download
1 / 11
110 likes | 1.06k Views
STABILNOST SISTEMA AUTOMATSKOG UPRAVLJANJA. Linearni sistem sa jednim ulazom u(t) i jednim izlazom y(t) je STABILAN ukoliko signal e(t) → 0 kada t → ∞, za proizvoljne početne uslove i u(t) = 0.

E N D
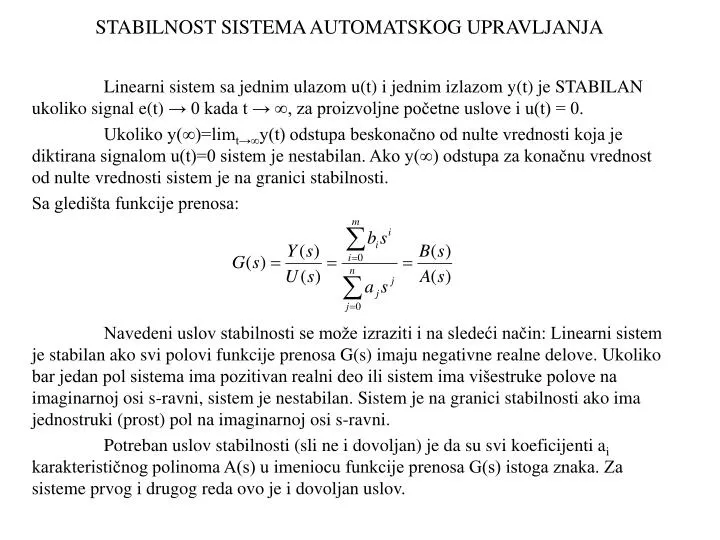
STABILNOST SISTEMA AUTOMATSKOG UPRAVLJANJA Linearni sistem sa jednim ulazom u(t) i jednim izlazom y(t) je STABILAN ukoliko signal e(t) → 0 kada t → ∞, za proizvoljne početne uslove i u(t) = 0. Ukoliko y(∞)=limt→∞y(t) odstupa beskonačno od nulte vrednosti koja je diktirana signalom u(t)=0 sistem je nestabilan. Ako y(∞) odstupa za konačnu vrednost od nulte vrednosti sistem je na granici stabilnosti. Sa gledišta funkcije prenosa: Navedeni uslov stabilnosti se može izraziti i na sledeći način: Linearni sistem je stabilan ako svi polovi funkcije prenosa G(s) imaju negativne realne delove. Ukoliko bar jedan pol sistema ima pozitivan realni deo ili sistem ima višestruke polove na imaginarnoj osi s-ravni, sistem je nestabilan. Sistem je na granici stabilnosti ako ima jednostruki (prost) pol na imaginarnoj osi s-ravni. Potreban uslov stabilnosti (sli ne i dovoljan) je da su svi koeficijenti ai karakterističnog polinoma A(s) u imeniocu funkcije prenosa G(s) istoga znaka. Za sisteme prvog i drugog reda ovo je i dovoljan uslov.
Za ocenu stabilnosti rade se kriterijumi, koji daju potrebne i dovoljne uslove linearnog sistema i omogućuju da se ispita stabilnost bez nalaženja korena karakteristične jednačine A(s)=0. Zadatak1. Za sistem čije su karakteristične jednačine date proveriti stabilnost primenom Rausovog kriterijuma. Za nestabilne odrediti broj polova koji se nalaze u desnoj poluravni s-ravni. a)F(s)=s4+2s3-1,5s2-s+1 Rausov kriterijum je analitička procedura koja omogućava da se ispita da li polovi sistema imaju negativan realni deo i odredi broj polova koji imaju pozitivan realni deo. Prvi korak je postavljanje šeme brojeva
gde se prve dve vrste formiraju direktno na osnovu koeficijenata a1 karakterističnog polinoma A(s), a koeficijenti u ostalim vrstama se generišu direktno na osnovu keficijenata iz prethodne dve vrste po algoritmu: Za karakterističnu jednačinu datu pod a) Rausova šema brojeva će biti, prva kolona je tzv. Rausova kolona u kojoj se prati promena znaka: Na osnovu prve kolone Rausove tablice se zaključuje da je sistem nestabilan (koeficijenti karakterističnog polinoma nisu istoga znaka). Broj polova u desnoj poluravni s-ravni je 2, jer je to broj promena znaka u prvoj Rausovoj koloni.
b) F(s)=s4+2s3+s2+2s+1 Na osnovu Rausove tablice se vidi da karakteristična jednačina nema polove u desnoj poluravni s-ravni, ali je sistem granično stabilan jer se u prvoj koloni pojavljuje vrednost 0 koj se piše kao ε, ε→0, jer ovo znači da mu je jedan pol na imaginarnoj osi. Pitanje: zašto je važno da polovi imaju negativne realne delove u s-ravni. Predstava kompleksnog broja je s=a+jb, gde su a i b brojevi koji odgovaraju koordinatma Re i Im (realnoj i imaginarnoj koordinati) a j je imaginarna jedinica odnosno -11/2. Kada je rešenje sa negativnim realnim delom, i uz pretpostavku da je imaginarni deo jednak nuli, tada će inverzna Laplaceova transformacija korena biti: f(t)=Ce-at, što predstavlja opadajuću eksponencijalnu funkciju po vremenu t, i to takvu da kada t→∞, f(t)→0. Kada su rešenja sa realnim delom u pozitivnoj poluravni s-ravni, onda je funkcija
u vremenskom domenu f(t)=Ceat, što je rastuća eksponencijalna funkcija koja teži beskonačnosti kada t teži beskonačnosti. • Kada karakteristični polinom ima rešenja na imaginarnoj osi, ona su obično u konjugovanim parovima što daje opšte rešenje u vremenskom domenu oblika: • f1(t)+f2(t)=Bsin(Re*t+ψ), što predstavlja periodičnu funkciju bez prigušenja pa se za ovakav sistem kaže da je na oscilatornoj granici stabilnosti. Inverzni Laplace • za slučajeve kompleksnih likova datih kao racionalne funkcije kompleksne promenljive s, odnosno razlomkom dvaju polinoma po s sa realnim koeficijentima • gde su rešenja u imeniocu polovi a u brojiocu nule racionalne funkcije F(s). Nule odnosno polovi se mogu javiti kao realne, u konjugovano kompleksnim parovima, mogu biti proste ili višestruke. Za inverznog Laplace-a je od interesa znati rešenja, korene, polinima Q(s). 1.slučaj: Kada su polovi realni i prosti: komleksni lik se može napisati u faktorizovanom obliku:
Faktorizacija polinoma • x4 - 2x3 + 2x2 -2x + 1 = x4 - 2x3 + x2 + x2 -2x + 1 = x2(x2 -2x + 1) + x2 -2x + 1 =(x2 + 1)(x - 1)2 • (x+i)(x-i)(x-1)2
koji se može razdvojiti na parcijalne razlomke: • Množeći levu i desnu stranu sa (s-sk) i zatim u tako dobijen izraz stavljajući da je s=sk, dobiće se: • odnosno: • Za s→sk, poslednji izraz postaje neodređen (0/0), pa zato treba primeniti pravilo Lhospital-a, nakon čega se dobija: • Zamenom dobijenih vrednosti za koeficijent Kk, dobija se: • Drugi član na desnoj strani poslednjeg izraza predstavlja kompleksni lik eksponencijalne funkcije, pa će se dalje dobiti da je:
pod uslovom da je t>0. Ovaj postupak je poznat kao Haevyside-ov razvoj. 2. slučaj: kada postoje konjugovano kompleksni polovi – postupak je isti samo malo komplikovaniji za izvođenje. • s= - α +jω i s*= - α - jω par konjugovano kompleksnih polova, tada je inverzna Laplace-ova transformacija: • gde su: a=ReK1, b=ImK1, a ψ=arctg(b/a). 3. slučaj: kada postoje višestruki polovi – primer trostrukog pola • Vraćanje na kriterijume za određivanje stabilnosti – Nyqvist-ov kriterijum je grafo-analitički metod koji omogućava ispitivanje stabilnost sistema sa zatvorenom povratnom spregom na osnovu poznavanja funkcije povratnog prenosa. Da bi sistem sa jediničnom povratnom spregom bio stabilan, funkcija spregnutog prenosa
gde je kW(s) funkcija povratnog prenosa, ne sme da poseduje polove sa pozitivnim realnim delom, odnosno polovi G(s) funkcije ne smeju da se nalaze u oblasti s-ravni obuhvaćenom Nikvistovom konturom (C). • Ako konturu C preslikamo u negativnom smeru (smer kretanja kazaljki na satu) u zatvorenu konturu C* ravni F(s)=1+kW(s), tada će kriva C* obuhvatiti u pozitivnom smeru koordinatni početak ove ravni N=P-Z puta, gde su P i Z broj polova i nula funkcije F(s). Obzirom da je P broj polova povratnog prenosa obuhvaćen konturom C, jednostavnije je da se kontura C preslika u konturu C* u ravni kW(s). Sada će kontura C* obuhvatiti kritičnu tačku (-1,j0) N puta, a Nikvistov kriterijum se može definisati na sledeći način: sistem sa zatvorenom spregom je stabilan ako je N=P. Odgovarajuća kontura C* se naziva Nikvistiva kriva. • Sistem će biti stabilan ako i samo ako Nikvistova kriva kW(jω) pri promeni ω od 0 do ∞ obuhvati kritičnu tačku (-1,j0) u pozitivnom smeru P/2 puta. • Zadatak: Karakteristični polinom sistema je: • f(s)=s3+2,5s2+(2,5+a)s+3a +4,5. • Primenom Nikvistovog kriterijuma ispitati stabilnost ovog sistema. • Postoji beskonačno mnogo sistema sa zadatim karakterističnim polinomom, i svaki od njih ima identične osobine po pitanju stabilnosti. Zato tražimo onu koja nam je najpogodnija za primenu Nikvistovog kriterijuma.
gde je W(s) funkcija povratnog prenosa čija je karakteristična jednačina f(s). Potrebno je dalje znati broj nestabilnih polova zašta će nam poslužiti Rausov kriterijum. U otvorenoj sprezi sistem je stabilan P=0 jer nema promene znaka u prvoj koloni. Dalje je W(jω)/a=R+jI: pri čemu je
Postupak racionalizacije u imeniocu i odvajanje realnog od imaginarnog dela funkcije W(s)/a. Tačke preseka Nikvistove krive (hodografa) sa realnom i imaginarnom osom su: Re=0 → ω1=1,39 i I=-3,87 I=0 → (ω0=0 i R=2/3) ili (ω2=2,45 i R=-0,285). Kako je P=0 onda -1/a treba da je manje od -0,285 da bi sistem bio stabilan, jer tada kritičnatačka nije obuhvaćena hodogramom.