Download
1 / 58
640 likes | 1.01k Views
Lecture 6 : Doppler Techniques: Physics, processing, interpretation . Doppler US Techniques . As an object emitting sound moves at a velocity v , the wavelength of the sound in the forward direction is compressed ( λ s ) and

E N D
Lecture 6: Doppler Techniques: Physics, processing, interpretation
Doppler US Techniques • As an object emitting sound moves at a velocity v, • the wavelength of the sound in the forward direction is compressed (λs) and • the wavelength of the sound in the receding direction is elongated (λl). • Since frequency (f) is inversely related to wavelength, the compression increases the perceived frequency and the elongation decreases the perceived frequency. • c = sound speed.
Doppler US Techniques • InEquations (1) and (2), fis the frequency of the sound emittedby the object and would be detected by the observer if the objectwere at rest. ±Δf represents a Doppler effect–inducedfrequency shift • The sign depends on the direction in whichthe object is traveling with respect to the observer. • These equations apply to the specific condition that the objectis traveling either directly toward or directly away from theobserver
Doppler US Techniques ftis transmitted frequency fr is received frequency v is the velocity of the target, θisthe angle between the ultrasound beam and the direction of the target's motion, and cis the velocity of sound in the medium
A simplified equivalent representation of an ultrasonic transducer
Block diagram of a non-directional continuous wave Doppler system
Block diagram of a non-directional pulsed wave Doppler system
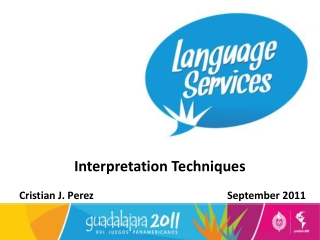
sin cos Gated transmiter Master osc. Demodulator Sample & hold Band-pass filter si Further processing Logic unit Receiver amplifier RF filter Demodulator Sample & hold Band-pass filter sq Transducer • Demodulation • Quadrature to directional signal conversion • Time-frequency/scale analysis • Data visualization • Detection and estimation • Derivation of diagnostic information V Processing of Doppler Ultrasound Signals
direct sampling • Effect of the undersampling. (a) before sampling; (b) after sampling
Understanding the complex Fourier transform • The Fourier transform pair is defined as • In general the Fourier transform is a complex quantity: • where R(f) is the real part of the FT,I(f) is the imaginary part, X(f) is the amplitude or Fourier spectrum of x(t) and is given by ,θ(f) is the phase angle of the Fourier transform and given by tan-1[I(f)/R(f)]
If x(t) is a complex time function, i.e. x(t)=xr(t)+jxi(t) where xr(t) and xi(t) are respectively the real part and imaginary part of the complex function x(t), then the Fourier integral becomes
Properties of the Fourier transform for complex time functions
Interpretation of the complex Fourier transform • If an input of the complex Fourier transform is a complex quadrature time signal (specifically, a quadrature Doppler signal), it is possible to extract directional information by looking at its spectrum. • Next, some results are obtained by calculating the complex Fourier transform for several combinations of the real and imaginary parts of the time signal (single frequency sine and cosine for simplicity). • These results were confirmed by implementing simulations.
Case (1). • Case (2). • Case (3). • Case (4). • Case (5). • Case (6). • Case (7). • Case (8).
The discrete Fourier transform • The discrete Fourier transform (DFT) is a special case of the continuous Fourier transform. To determine the Fourier transform of a continuous time function by means of digital analysis techniques, it is necessary to sample this time function. An infinite number of samples are not suitable for machine computation. It is necessary to truncate the sampled function so that a finite number of samples are considered
Hilbert transform • The Hilbert transform (HT) is another widely used frequency domain transform. • It shifts the phase of positive frequency components by -900 and negative frequency components by +900. • The HT of a given function x(t) is defined by the convolution between this function and the impulse response of the HT (1/πt).
Hilbert transform • Specifically, if X(f) is the Fourier transform of x(t), its Hilbert transform is represented by XH(f), where • A ±900 phase shift is equivalent to multiplying by ej900=±j, so the transfer function of the HT HH(f) can be written as
impulse response of HT An ideal HT filter can be approximated using standard filter design techniques. If a FIR filter is to be used , only a finite number of samples of the impulse response suggested in the figure would be utilised.
x(t)ejωct is not a real time function and cannot occur as a communication signal. However, signals of the form x(t)cos(ωt+θ) are common and the related modulation theorem can be given as • So, multiplying a band limited signal by a sinusoidal signal translates its spectrum up and down in frequency by fc
Digital filtering • Digital filtering is one of the most important DSP tools. • Its main objective is to eliminate or remove unwanted signals and noise from the required signal. • Compared to analogue filters digital filters offer sharper rolloffs, • require no calibration, and • have greater stability with time, temperature, and power supply variations. • Adaptive filters can easily be created by simple software modifications
Digital Filters • Non-recursive (finite impulse response, FIR) • Recursive (infinite impulse response, IIR). • The input and the output signals of the filter are related by the convolution sum. • Output of an FIR filter is a function of past and present values of the input, • Output of an IIR filter is a function of past outputs as well as past and present values of the input
DSP for Quadrature to Directional Signal Conversion • Time domain methods • Phasing filter technique (PFT) (time domain Hilbert transform) • Weaver receiver technique • Frequency domain methods • Frequency domain Hilbert transform • Complex FFT • Spectral translocation • Scale domain methods (Complex wavelet) • Complex neural network
GENERAL DEFINITION OF A QUADRATURE DOPPLER SIGNAL • A general definition of a discrete quadrature Doppler signal equation can be given by • D(n)and Q(n), each containing information concerning forward channel and reverse channel signals (sf(n) and sr(n) and their Hilbert transforms H[sf(n)] and H[sr(n)]), are real signals.
An alternative algorithm is to implement the HT using phase splitting networks • A phase splitter is an all-pass filter which produces a quadrature signal pair from a single input • The main advantage of this algorithm over the single filter HT is that the two filters have almost identical pass-band ripple characteristics
Weaver Receiver Technique (WRT) • For a theoretical description of the system consider the quadrature Doppler signal defined by which is band limited tofs/4, and a pair of quadrature pilot frequency signals given by where ωc/2π=fs/4. • The LPF is assumed to be an ideal LPF having a cut-off frequency of fs/4.