Download
1 / 43
440 likes | 673 Views
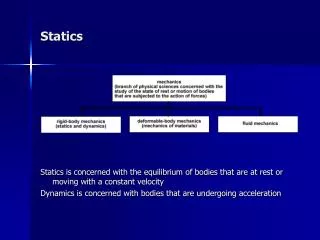
Engineering Mechanics – deals with the state of a body at rest or motion of a body caused by the action of forces. Statics – deals with the action of forces on bodies at rest. Dynamics – deals with the motion of bodies under the action of forces.

E N D
Engineering Mechanics – deals with the state of a body at rest or motion of a body caused by the action of forces. Statics – deals with the action of forces on bodies at rest. Dynamics – deals with the motion of bodies under the action of forces. • Kinematics– study of motion without reference to the forces which cause the motion. Deals with position, velocity, and acceleration in terms of time • Kinetics– relates the action of forces on bodies to their resulting motions MAE
Particle A body , not necessarily small, where it’s motion can be characterized without considering its size and orientation. Rotation of the body about its own axis is neglected. Rigid body The body is called a rigid body If its rotation about its own axis cannot be neglected. MAE
Problem Solving Technique • Identify all given data • Identify the desired results • Identify the dynamics principles applied to the problem • Draw the necessary diagrams • Clearly state all assumptions • Use your technical judgment (common sense) to determine if the answer is reasonable. • Report the answer with the same accuracy as the given data • Careless solutions that cannot be read easily are of little or no value MAE
Position of a point in space coordinate systems • Rectangular (Cartesian) coordinates, x, y, and z • Cylindrical coordinates, r, θ, andz • Spherical coordinates, R, θ, and φ MAE
Planar (2D) Motion • Rectangular (Cartesian) coordinates, x and y • Polar coordinates, r andθ y P x = r cosθ r y y = r sinθ θ O x x MAE
Kinematics Position r = r{t} Velocity Acceleration MAE
Graphical representation Velocity at time t is the slope of the line tangent to displacement curve. Acceleration at time t is the slope of the line tangent to velocity curve. Given the displacement curve, velocity and acceleration curves could be obtained graphically. MAE
Rectilinear Motion Particle moving along a straight line from P to P’ P P’ O +s -s Δs s At time t + Δt the particle has moved to P’ Δs v = lim Δt Δt → 0 MAE
Rectilinear Motion Relationship between displacementandvelocity Relationship between velocityandacceleration MAE
If s=s{t} and vis constant: Special Cases: Constant Velocity or Acceleration • If v = v{t} and a is constant: • If s = s{t}and a is constant: • If v = v{s} and a is constant: MAE
Example The acceleration of a train (at least during the interval from t = 2 to t= 4) is a= 2t, and it is known that at t= 2 its velocity v = 50. What is the train’s velocity at t= 4? (Assume all units are already consistently in SI units). MAE
Example • The acceleration of a train during the interval from t = 2 to t = 4 is a = 2t, and it is known that at t = 2 its velocity v is 50. • What is the train’s velocity at t = 4? (Assume all units are already consistently in SI units). MAE Image(s) from Engineering Mechanics: Dynamics, 3rd ed., by A. Bedford & W. T. Fowler, Prentice Hall, 2002.
Example After deploying its drag parachute, the airplane shown has an acceleration a = -.004v2 (m/s²). • Determine the time required for the velocity to decrease from 80 m/s to 10 m/s. • What distance does the plane cover during that time? MAE
Example After deploying its drag parachute, the airplane shown has an acceleration a = -.004v2 (m/s). • Determine the time required for the velocity to decrease from 80 m/s to 10 m/s. • What distance does the plane cover during that time? MAE Image(s) from Engineering Mechanics: Dynamics, 3rd ed., by A. Bedford & W. T. Fowler, Prentice Hall, 2002.
Curvilinear Motion – 3D Particle moving along a curved path. Rectangular coordinates is particularly useful for describing the curvilinear motion MAE
Curvilinear Motion – 2D (planar motion) Projectile motion Motion in the x direction (horizontal motion) Motion in the y direction (vertical motion) MAE
Curvilinear Motion – Projectile Motion Horizontal motion Vertical motion Velocity Displacement MAE
Example • The skier leaves the 20° ledge with a speed of 10 m/s (along the upper inclined surface). • How far along the lower incline does she land? (What is the distance d?) MAE
Example • The skier leaves the 20° ledge with a speed of 10 m/s (along the upper inclined surface). • How far along the lower incline does she land? (i.e. What is the distance d?) (vo )y vo (vo )x (vo )x = vo cos20 (vo ) = 10 m/s (vo )y = -vo sin20 xo = 0 x yo = 0 x x= vocos20 t = 10 cos20 t = 9.4 t y= - vosin20 t - ½ gt2 = 10 cos20 t = - 3.42 t - 4.9t 2 y = - 3 - x t = 1.6 s x = 15 m d= 21.3 m y = -18 m MAE
Curvilinear Motion – Normal and Tangential coordinates These coordinates provide a natural description for curvilinear motion and are frequently the most convenient coordinates to use. • Coordinate s measures position of point P along its path with respect to origin O. • Velocity v is always tangent to unit vector ut. • Unit vector un is always perpendicular to ut, and points toward the concave side. • Unit vector ut is tangent to the curve at P, and points in the direction of increasing s. MAE
Curvilinear Motion – Normal and Tangential Acceleration Two components of acceleration MAE
Radius of Curvature and Normal Component of Acceleration Tangential component Normal component MAE
Circular Path Velocity and acceleration Magnitude of tangential acceleration Magnitude of normal acceleration MAE
Example • A motorcycle starts from rest on a circular track of radius 400 m, and accelerates with a tangential acceleration of at = 2 + 0.2t m/s². • How much distance does the motorcycle cover in the first 10 seconds? • What is the magnitude of total acceleration |a| at the 10-second mark? MAE
Example • A motorcycle starts from rest on a circular track of radius 400 m, and accelerates with a tangential acceleration of at = 2 + 0.2t m/s². • How much distance does the motorcycle cover in the first 10 seconds? • What is the magnitude of total acceleration |a| at this 10-second mark? MAE Image(s) from Engineering Mechanics: Dynamics, 3rd ed., by A. Bedford & W. T. Fowler, Prentice Hall, 2002.
Curvilinear Motion – Polar Coordinates Velocity MAE
Curvilinear Motion – Polar Coordinates Acceleration MAE
Example • A point P moves along the spiral path r = (0.1) q meters, where q is in radians. The angular position q = 2t rad, where t is in seconds, and r = 0 at t = 0. Determine the magnitudes of the velocity and acceleration of P at t = 1 s. MAE
Example • A point P moves along the spiral path r = (0.1) q meters, where q is in radians. The angular position q = 2trad, where t is in seconds, and r = 0 at t = 0. Determine the magnitudes of the velocity and acceleration of P at t = 1 s. MAE Image(s) from Engineering Mechanics: Dynamics, 3rd ed., (Problem 13.185) by A. Bedford & W. T. Fowler, Prentice Hall, 2002.
Coupled-Motion • Some problems are “disguised” as being more complicated, even though there is really only one degree of freedom. • These problems can be simplified by using geometry to relate the motions of each moving point, then taking derivates to relate velocity and acceleration. • To express the dependency properly, position coordinate s needs to be defined with respect to a fixed datum, with deliberately assigned positive direction. • Questions: • How are sA, sB, and h related? • How are vA and vB related? • How are aA and aB related? MAE
Relative Motion • If point A is a moving particle, it can be assigned a “local” reference frame that translates with respect to a fixed reference frame with origin O. • From the perspective of point A, the relative motion of other points such as B is often more useful than motion with respect to a fixed reference frame. • Vector analysis provides an effective way to express the relative motion between particles, based on the motion of each with respect to a fixed reference frame. MAE
Example The bars OP and PQ rotate with constant angular velocities relative to the fixed coordinate system as shown. What is the acceleration of point Q relative to the coordinate system. aQ = aP + aQ/P Point Q (bar PQ) is not attached to the fixed reference point. So use relative motion approach ωOP = 4 rad/s constant and ccw dωOP dωPQ d 2θPQ d 2θOP αPQ = 0 = αOP = 0 = = = dt dt dt2 dt2 ωPQ = 8 rad/s constant and cw MAE
Example Use polar coordinate system d rOP d θOP d 2θOP rOP aP= (uθ)OP + + 2 dt dt dt2 d 2rOP dt2 d 2rOP d rOP OP length is constant = 0 and = 0 dt2 dt d θOP d θOP rOP rOP aP= (ur)OP ()2 ()2 (ur)OP dt dt d θQp rQP aQ/P= ()2 rQP (sin45) j i rQP rOP (ur)QP (cos45)i ωQP ωQP ωOP = = 2 2 2 dt rOP rQP rQP (sin45)j ωOP (cos45)i ωQP ωQP 2 2 2 aQ = aP + aQ/P = MAE
Example aQ = aP + aQ/P = aQ = - (2)(4)2 – (√ 2)(8)2(cos45) i - (√ 2)(8)2(sin45) j aQ= 96 i – 64 j aQ= √(96)2+ (64)2 = 115.38 ft/s2 64 β = tan-1 = 33.7O 96 33.7O aQ rOP rQP rQP (sin45)j ωOP (cos45)i ωQP ωQP 2 2 2 MAE
Problem Formulation and Review The ability to select the most appropriate method is a key to the successful formulation and solution of engineering problems. It is important to recognize the following breakdowns: Type of motion • Rectilinear motion • (one coordinate needed to describe the motion) • Plane curvilinear motion • (two coordinate needed to describe the motion) • space curvilinear motion • (three coordinate needed to describe the motion) MAE
Problem Formulation and Review Reference axes • Fixed reference axes • Absolute motion - axes attached to the surface of the earth are sufficiently “fixed” for most engineering problems • Moving reference axes • Relative motion - axes attached to a moving body that is not attached to a fixed reference Fixed axes MAE
Problem Formulation and Review Coordinates A very important step in formulation of a problem The options: • Rectangular (Cartesian) coordinates • x, y2D motion • x, y, z3D motion • Normal and tangential coordinates • n, t2D curvilinear motion • Polar coordinates • r, θ2D motion • Cylindrical coordinates • r, θ, z 3D motion • Spherical coordinates • R, θ, φ3D motion MAE
Problem Formulation and Review The choice is dictated by how the motion is generated or measured Type of Coordinates Type of Motion Straight line (rectilinear) motion Rectangular, x(ors) Curvilinear motion Polar (r, θ) Rectangular (x, y) Curvilinear motion, when measurements are made along the curve Normal and tangential (n, t) Polar (r, θ) Sliding and rotating motion at the same time Space curvilinear motion Rectangular (x, y, z)Cylindrical (r, θ, z) Spherical (R, θ, φ) MAE
Examples Rectangular, x(or s) Polar (r, θ) Rectangular (x, y) Spherical (R, θ, φ) Normal and tangential (n, t) MAE
Examples Polar (r, θ) Cylindrical (r, θ, z) Polar (r, θ) Rectangular(x, y) MAE
Examples Polar (r, θ) Rectangular (x, y) Rectangular, x(or s) Polar (r, θ) Cylindrical (r, θ, z) MAE
Examples Rectangular, x(or s) Spherical (R, θ, φ) Spherical (R, θ, φ) MAE

![L 13 Fluids [2]: Statics fluids at rest](https://cdn0.slideserve.com/64296/l-13-fluids-2-statics-fluids-at-rest-dt.jpg)
![L 13 Fluids [2]: Statics fluids at rest](https://cdn0.slideserve.com/472286/l-13-fluids-2-statics-fluids-at-rest-dt.jpg)
![L 13 Fluids [2]: Statics fluids at rest](https://cdn1.slideserve.com/3002941/l-13-fluids-2-statics-fluids-at-rest-dt.jpg)