Download
1 / 19
200 likes | 514 Views
MODBUS 技术实现. 西安航天自动化股份有限公司 何军红. ■ 西安航天自动化股份有限公司简介 ▲ 公司概况及在自动化系统集成方面的业绩 ▲ 同施耐德公司合作发展过程及应用 MODBUS 技术的情况 ■ MODBUS 技术技术特点及应用发展趋势 ■ MODBUS 技术大型工程应用实例 ▲ 广西岩滩/高坝洲升船机应用 ▲ 湖北高坝洲升船机应用. ■ 西安航天自动化股份有限公司简介. ▲ 公司概况及在自动化系统集成方面的业绩

E N D
MODBUS技术实现 西安航天自动化股份有限公司 何军红
■西安航天自动化股份有限公司简介 ▲公司概况及在自动化系统集成方面的业绩 ▲同施耐德公司合作发展过程及应用MODBUS技术的情况 ■MODBUS技术技术特点及应用发展趋势 ■MODBUS技术大型工程应用实例 ▲广西岩滩/高坝洲升船机应用 ▲湖北高坝洲升船机应用
■西安航天自动化股份有限公司简介 ▲公司概况及在自动化系统集成方面的业绩 西安航天自动化股份有限公司是以西安长峰科技产业集团公司(中国航天科工集团二一零研究所)为基础,于2000年3月份实现股份制改制成立的国家级高科技企业,位于西安高新技术产业开发区电子园,注册资本5324.11万元。 西安航天依靠“系统工程、可靠性、自动控制和机电一体化”四大技术优势,以工程和产品为载体,形成了“自动控制系统和机电一体化产品”两大产业格局,具有成功研制生产1200多项工程和产品的业绩基础,其中包括泰国巴帕南水闸工程控制系统、三峡工程升船机可靠性分析和五级船闸集中控制系统方案研究、岩滩水电站升船机电力拖动与系统监控、长治市辛安引水二期扩建改造工程仪表控制通讯调度及工业电视系统、黄河小浪底水利枢纽工程公用设备及网络控制系统等国内外大中型工程项目。 工程业绩遍及国内三十一个省、市、自治区,并进入泰国、苏丹、老挝、毛里求斯、马来西亚、巴基斯坦、伊朗、叙利亚、等国家和地区的大型工程技术市场。
▲同施耐德公司合作发展过程及应用MODBUS技术的情况▲同施耐德公司合作发展过程及应用MODBUS技术的情况 公司前身从1984年“军转民”开始从事工业自动化和机电一体化设备研制开发。1987年公司完成了电力系统的第一个输煤程控系统项目:石横电厂输煤程控系统。控制系统采用MODICON584A,1000多个I/O控制点。 1991年我们在吴泾电厂的输煤程控系统中采用MODICON984A,1500多个I/O控制点。并逐步在其它行业工程项目中引进使用MODICON984-680、MODICON984-685、MODICON984-785 PLC系统,包括热备系统应用。1996年开始应用MODICON-QUANTUM系列PLC系统。 目前我们在火力发电厂辅机自动化系统、水电站辅机自动化控制系统、过坝通航升船机控制系统、城市污水、供水仪表及控制系统、煤炭、化工自动化控制系统中,累计超过200多项工程项目中采用MODICON系列PLC控制系统。 通过20多年的长期友好合作,施耐德公司的自动化系统设备和MODBUS网络技术为我们提供了强有力的技术保障,我们也不断在大型工程项目中应用施耐德公司推出的新技术和产品。
■MODBUS技术特点及应用发展趋势 在工程应用中,目前我们主要应用的网络有:Modbus、Modbus Plus、Modbus TCP/IP工业以太网。 Modbus Modbus协议1978年由Modicon公司开发出来,现已成为工业领域全球最流行的协议。 Modbus协议为应用层报文传输协议,仅定义了通讯消息结构,一个Modbus信息桢包括从机地址、功能码、数据区和数据校验码。可使用RS232、RS422和RS485端口,可以使用光纤、无线等媒质实现通讯,广泛应用在智能设备之间进行主、从方式通讯。 Modbus协议定义了一个控制器能认识使用的消息结构,而不管它们是经过何种网络进行通信的。它制定了消息域格局和内容的公共格式。当在一Modbus网络上通信时,此协议决定了每个控制器须要知道它们的设备地址,识别按地址发来的消息,决定要产生何种行动。如果需要回应,控制器将生成反馈信息并用Modbus协议发出。在其它网络上,包含了Modbus协议的消息转换为在此网络上使用的帧或包结构。这种转换也扩展了根据具体的网络解决节地址、路由路径及错误检测的方法。 PLC control
Modbus Plus Modbus Plus是一种典型的令牌环网,完整定义了通讯协议、网络结构、连接电缆(或者光缆)等方面的性能指标。网络中的设备通过“令牌”的方式实现数据的交换,严格定义了令牌的传递方式,数据校验以及通讯端口等方面的技术参数。 Modbus plus总线协议是一种异步半双工通讯的对等网络协议,物理接口为RS485,通讯介质采用屏蔽双绞线或光纤。在链路层,Modbus plus采用IEEE802.2逻辑链路控制协议和IEEE802.4令牌总线媒体访问控制协议。 在应用层,Modbus plus采用Modbus的通讯协议,主要包括寄存器读写、开关量I/O等命令。Modbus协议在Modbus plus网络中使用时,要将传递的信息的内容进行相应的封装,封装格式有两种ASCII和RTU。 Modbus plus可以采用双电缆结构,允许Modbus plus在两条独立的电缆上通讯,实现网络通讯线路的冗余备份,适合高可靠性的应用场合。
Modbus TCP/IP 由于Modbus主机/从机通信机理能很好地满足确定性的要求,非常适合以太网中的客户机/服务器的通信机理。1996年施耐德公司推出了基于以太网TCP/IP的Modbus协议,即为Modbus TCP/IP协议,在工业自动化领域中,具有很高的性能价格比,是一种真正开放的解决方案。目前已经是世界上最主要的工业以太网协议。 施耐德公司的“透明工厂”就是基于Modbus TCP/IP技术。目前Modbus TCP/IP已作为现场总线使用,在PLC设备中也内置网页服务器,使以太网的远程I/O设备具备了在网上浏览该远程I/O状态的功能。在设备层、控制层和信息层中都可以采用Modbus TCP/IP技术,能在监控室或远程浏览连接到网络的所有设备和智能传感器。由于以太网已得到广泛地应用,技术成熟,设备成本低,使系统具有可延伸性、灵活性和高性能价格比等特点。
■Modbus技术大型工程应用实例 我们在工程项目应用Modbus技术,经历了从Modbus、Modbus Plus、Modbus TCP/IP的发展过程。 ▲岩滩升船机(1996-2000年) 岩滩升船机采用Modbus Plus双缆冗余现地网络通讯技术。
岩滩升船机为钢丝绳卷扬部分平衡垂直升船机,为适应下游水位变幅大和变率大的特点,采用承船厢在下游入水运行方式。 岩滩升船机为钢丝绳卷扬部分平衡垂直升船机,为适应下游水位变幅大和变率大的特点,采用承船厢在下游入水运行方式。 • 升船机布置在枢纽左岸,由上下游引航道及编队码头、挡水坝段、通航明渠、上下闸首、塔柱、主机房和中控室等主要建筑物和主机、承船厢、平衡重、上下闸首启闭机、电气传动、计算机监控、液压传动、检测与监视、交通指挥等主要机电设备组成。 • 升船机设计最大通航船舶250t铁驳,型长37m、型宽9m、满载吃水深1.27m。设计年货运量180×104t,其中下航140×104t、上航40×104t。上游最高通航水位223m,最低通航水位212m。下游最高通航水位162.5m,最低通航水位154.5m。通航净空8.3。升船机最大提升高度68.5m,空中升降速度11.4m/min,升降加速度0.1m/s2。 • 主机设在240.6m高程的主机房内,由4套卷扬机构与4套滑轮组组成。卷扬机构通过刚性同步轴联成环形封闭同步系统。卷筒直径3200mm,承船厢的吊点数64个。承船厢系梁格体系薄壁凹槽型钢结构,两端各设有卧倒式钢闸门。承船厢外形尺寸48.5m×16.2m×4.4m,有效水域40m×10.8m,额定水深1.80.1m,承船厢载水总重量1430t。
承船厢液压调平均衡系统采用高性能比例阀和进口液压油缸,每套比例阀控制12套油缸,可进行静态或动态调平,调平精度可达3~5mm。承船厢液压调平均衡系统采用高性能比例阀和进口液压油缸,每套比例阀控制12套油缸,可进行静态或动态调平,调平精度可达3~5mm。 • 电气传动系统采用4台单机容量339KW进口直流电动机和一个速度外环带四个电流内环的传动方式,实现传动出力均衡调节,自动适应因承船厢出入水运行而产生的大范围负载变化,保证承船厢运行平稳。 • 计算机监控采用分层分布式,主控级与现地子站级高速串行数据总线互连,构成冗余双重LAN局网,监控快捷可靠,可提供远程访问,运行状态显示,故障及事故报警、显示、记录、应急保护等。 • 本项目投资1亿多元。计算机控制系统、电气传动系统及液压调平系统4000多万元,由我单位负责设计、制造、安装、调试总承包。本项目含中央控制系统、现地子站、电气拖动、液压调平系统及检测系统、工业电视监视、广播对讲、交通指挥系统等。 • 本项目1997年10月完成制造和工厂检验、测试及验收;1999年12月完成现场设备安装调试,并正式通航运行;2000年5月25日通过竣工验收;2000年11月17日通过由潘家铮两院士主持的国家级鉴定。 • 本工程项目为国内国际第一个全自动钢丝绳卷扬垂直入水式升船系统,250t级,船舶过坝过程仅需20分钟。
①控制系统组成 整个控制系统由主控级与上闸首控制子站、主提升机控制子站、承船箱控制子站和下闸首控制子站组成两级分布式计算机监控系统,另外还设有检测系统、电气传动系统、船厢液压调平与均衡系统、交通指挥系统、工业电视监视系统、有线广播系统、有线对讲系统、无线通讯系统和仪器仪表设备。
控制系统功能 • 主控级 设置在中央控制室,配有操作员站、工程师站、多媒体站和模拟屏站,是指挥管理中心,负责对全系统的监视和上位级别的控制(按控制逻辑向各子系统发布各种宏观命令);负责系统运行,管理数据资料的存储和报表生成;负责各种信息和数据的报警、提示及事故记录处理;为系统运行规律的优化设计提供条件,并负责各种定值参数的修改和监控软件的组织与修改。大型动态模拟屏可实时显示船厢上、下行的全过程及显示各种运行参数。 • 主提升机控制子站 是升船机控制系统的关键系统之一,是集计算机控制、信号检测、网络通讯、电气传动、液压传动和直流调速等为一体的综合计算机监控系统。包括4套用于主提升拖动的全数字调速系统(包括4台339kW电机)及4套工作制动器、48套安全制动器和8套润滑站的控制。完成承船厢的提升、下降及准确制动、停位控制。 • 承船厢控制子站 是升船机控制系统的关键系统之一,是集计算机控制、信号检测、网络通讯、液压控制于一体的综合计算机监控系统。采用计算机监控为主、手动控制为辅的控制方式,用于升船机承船厢液压调平与均衡系统、船厢定紧装置、夹紧装置、卧倒门以及液压泵站等装置参数的检测于控制。 • 上闸首控制子站 由工作闸门控制单元与防撞梁控制单元、配电及交通指挥现地控制单元、卧倒门密封框及充泄水现地控制等部分组成,既能独立完成相关设备的控制、状态监视、系统保护和报警功能,又能在中控室上位机指挥下达协调工作,完成对上闸首的各项检测任务。 • 下闸首控制子站 由下闸首PLC子站、检测元件、执行机构和通讯网络等部分组成,是一个相对独立的小型控制系统。为便于集中管理,下闸首交通指挥系统将各交通指挥信号灯、边界灯、中心灯现地手动集中设置在该控制子站
②控制系统特点 • 分层分布式集散控制系统结构 • 基于WINDOWS/NT的视窗控制技术 • 双机热备用操作员站 • 双缆双以太网冗余通讯 • Modbus Plus双缆冗余现地网络通讯 • 采用Modicon Quantum系列数字化PLC冗余控制技术 • PLC子站设置PanelMate可视控制盘,人机功能非常强大 • 完备的自动、软手动、硬手动控制方式保证系统全天候安全运行 • 采用全数字直流调速系统,各主提升电机同步运行,转矩差小于当时平均转矩的3% • 船厢动态调平,部分调平精度5mm • 采用PID闭环控制技术使液压启闭机的不同步误差小于3mm
该项目2000年通过国家级鉴定,达到国际先进技术水平。该项目2000年通过国家级鉴定,达到国际先进技术水平。 1 船舶驶入船厢池 3 承船厢载船向上运行 2 船舶进入船厢池 4 承船厢与上闸首对接
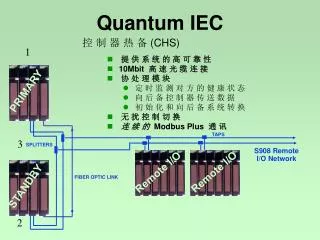
热备 工程师工作站 操作员站 服务器 多媒体工作站 操作系统:Windows NT4.0 Server上位组态软件:Intouch7.0 10M以太网 • MODBUS PLUS MB+ 双网冗余 主提升LCU 承船厢LCU 上闸首LCU 下闸首LCU 广西岩滩水电站升船机电气控制系统网络结构图
▲湖北高坝洲升船机(2001年-至今) 高坝洲升船机采用Modbus TCP双环网控制网络技术。 高坝洲水利枢纽通航建筑物为一级垂直升船机,升船机建筑物从上游至下游依次布置有:上游编解锚地、上游引航道(在引航道内左侧设有浮式导航堤)、上闸首、垂直升船机主体、下闸首、下游引航道、下游编解锚地等建筑物。 升船机采用钢丝绳卷扬全平衡垂直提升式。船舶过坝时,通过上、下闸首驶入装有水的钢质承船厢内。承船厢由多根钢丝绳悬吊,通过设于承重塔柱顶部机房内的提升主机驱动,使之沿承重塔柱导轨垂直升降运行,运送船只过坝。 升船机主体设备由提升主机、承船厢、平衡重系统及其它辅助设备组成。提升主机布置在塔柱顶部的主机房内,机房地面高程▽90.0m。提升主机包括4套双卷筒卷扬提升机构和8套平衡滑轮组,每套提升机构各由一台75kW 的交流电机驱动,4套提升机构间通过机械同步轴联接,形成封闭的同步轴系统。每个卷筒上绕有6根Ф56mm的钢丝绳,其中3根提升绳通过液压均衡油缸与船厢连接,另3根反向缠绕的转矩平衡绳与转矩平衡重相连。每套提升机构的两侧对称布置2组平衡滑轮组,每个滑轮组有4片滑轮,绕过滑轮的重力平衡绳两端分别与船厢和重力平衡重相连。卷筒、滑轮的名义直径均为3.5m。提升主机的额定提升力1600kN,最大提升高度40.3m。主机房内设有一台 630kN/2×100kN的双向检修桥机,供主机安装、检修使用。 升船机提升主机有4个驱动单元,每个驱动单元由一台交流电动机驱动, 每台电动机配置一套交流变频传动装置。交流变频传动装置布置在位于提升主机机房右侧的主电室。
承船厢为钢质槽形结构,由56根钢丝绳悬吊,并通过提升主机驱动,在升船机室内沿塔柱上下运行。其有效水域42.0m×10.2m×1.7m(长×宽×水深),外形尺寸50.0m×14.0m×6.5m(长×宽×厢头高),船厢结构、设备加厢内水体总重约1560t。为满足船厢运行和与闸首对接的需要,在厢头两端设有船厢门、厢门启闭机及防撞设备;在两端下部的机舱内设有“U”型活动密封框、充泄水系统和液压油泵站;在船厢中部两侧设有顶紧机构;在距船厢横向中心线17.75m处,对称布置有4套夹紧机构和导向装置;船厢两端外侧设有疏散爬梯;此外,船厢上还设置有消防、照明、通讯、供电、电气控制等设备。在船厢室底部和塔柱上部,分别设置了用于船厢安装、检修的上、下锁定装置。承船厢的总重量由相同重量的平衡重全部平衡。平衡重有两种,一种是重力平衡重,共1024t,分成8组,布置在塔柱的8个重力平衡重井内:另一种是转矩平衡重,共536t,分为4组,布置在4个转矩平衡重井内。平衡重组在井内沿导轨上、下运行。平衡重井在▽81.Om高程和▽33.Om 高程,分别设有平衡重上、下锁定平台,并配置锁定设备,用于升船机安装、检修时将平衡重锁定。我公司负责升船机的中央控制系统、现地子站、电气拖动、液压调平系统及检测系统、工业电视监视、广播对讲、交通指挥系统、船厢火灾报警等系统。
控制网络特点 • 分层分布式集散控制系统结构 • 基于WINDOWS/NT的视窗控制技术 • 双机热备用操作员站 • 集中控制采用100M快速以太网通讯 • 现地控制采用100M Modbus TCP双缆环网通讯技术 • 采用Modicon Quantum系列数字化PLC冗余控制技术 • 传动控制子站采用10M Modbus TCP通讯技术
谢谢 您的参与!