Download
1 / 26
260 likes | 348 Views
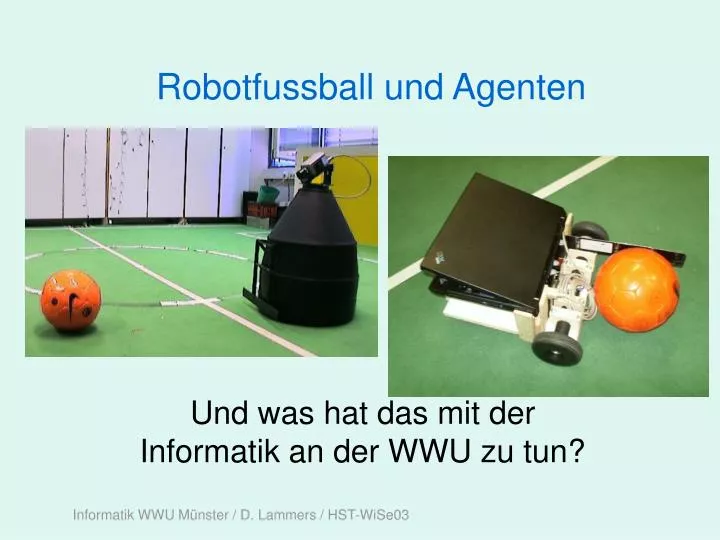
Robotfussball und Agenten. Und was hat das mit der Informatik an der WWU zu tun?. Historie. Schaffen eines „Standard Problems“ 2050 soll ein Roboter-Fussballteam die WN gewinnen 1993: Robot World Cup Initiative 1995: Ankündigung der Weltmeisterschaft 1997: erste Weltmeisterschaft

E N D
Robotfussball und Agenten Und was hat das mit der Informatik an der WWU zu tun? Informatik WWU Münster / D. Lammers / HST-WiSe03
Historie • Schaffen eines „Standard Problems“ • 2050 soll ein Roboter-Fussballteam die WN gewinnen • 1993: Robot World Cup Initiative • 1995: Ankündigung der Weltmeisterschaft • 1997: erste Weltmeisterschaft • Dann: jährliche Weltmeisterschaften mit stark steigenden Publikumszahlen Informatik WWU Münster / D. Lammers / HST-WiSe03
Die verschiedenen Ligen RoboCup Soccer Rescue Junior Simulation Middle Size Rescue Challenge Humanoid Soccer Challenge Small Size Sony Legged Rescue Simulation League Dance Challenge Rescue Robot League SoloGames Freestyle Games Shoot Ein Bein Penalty Shoot Soccer Walk Informatik WWU Münster / D. Lammers / HST-WiSe03
Simulation League Informatik WWU Münster / D. Lammers / HST-WiSe03
Simulation League Regeln • 11 Spieler pro Mannschaft • Alle Programmiersprachen möglich • Verschiedene Parameter • Offizielle FIFA Regeln • Indirekte Kommunikation Informatik WWU Münster / D. Lammers / HST-WiSe03
Simulation League Bedingungen • Die Simulationsliga ist ausschließlich Softwarebasiert. Elf autonome Agenten spielen in einer Mannschaft gegen eine andere Mannschaft auf einem Spielfeld (dem Multi Agenten System). Die Spieleragenten dürfen indirekt (über den SoccerServer) miteinander kommunizieren. • Es gelten die offiziellen FIFA-Regeln. Die Spieleragenten haben verschiedene Sensoren, über die sie Informationen über die Spielsituation erhalten. • Sie können bis zu einer Entfernung von 50 m hören. • Der visuelle Sensor teilt ihnen mit, was in einem Winkel von 90 vor ihnen passiert (Je nach Entfernung sehen sie mehr oder weniger Details wie Mannschaftszugehörigkeit und Spielernummer). • Ein Sensor für die eigene körperliche Verfassung teilt ihnen z.B. den Grad der Erschöpfung mit und erlaubt so eine Anpassung ihres Verhaltens andie "physische" Verfassung. Informatik WWU Münster / D. Lammers / HST-WiSe03
Demo Informatik WWU Münster / D. Lammers / HST-WiSe03
Middle Size Robot League Informatik WWU Münster / D. Lammers / HST-WiSe03
Middle Size League - Feld+Spieler • Spielfeld: ca. 10m * 5m • Spieldauer: 2 * 10 Minuten • Ball: FIFA Standardball (Farbe: orange) • Max. 4 Spieler (incl. Torwart) • Keine Abseitsregel Informatik WWU Münster / D. Lammers / HST-WiSe03
Middle Size League - Robbies Robots • Größe: zwischen 50*50 cm und 60*60 cm • 30 bis 80 cm hoch • Gewicht: max. 80kg • Farbe: Schwarz mit Farbmarkierung • Kommunikation erlaubt • Keine globale Kamera Informatik WWU Münster / D. Lammers / HST-WiSe03
Demo Informatik WWU Münster / D. Lammers / HST-WiSe03
Demo Informatik WWU Münster / D. Lammers / HST-WiSe03
Roboter lokal Und an der Uni Münster?? Informatik WWU Münster / D. Lammers / HST-WiSe03
Roboter lokal • Erst seit dem laufenden Semester: Lego MindStorm Roboter Informatik WWU Münster / D. Lammers / HST-WiSe03
Lego Mindstorm Roboter • RCX-“Brick“: • Mikroprozessor mit etwas Speicher: 36kB für bis zu 5 per Tasten wählbare Programme • 6 Batterien / Akkus • 3 Sensor-Eingänge (Tast-, Licht-, Rotations-) • 3 Aktor-Ausgänge (Motoren, Lampe) • IR-Sender/Empfänger, USB-IR-Tower Informatik WWU Münster / D. Lammers / HST-WiSe03
Hintergrund / Intention • Landminenerkennung und -beseitigung ist „grosses Ziel“ • Ausserdem sehr lehrreich, und gut motivierend. Informatik WWU Münster / D. Lammers / HST-WiSe03
Hintergrund / Intention • Interessante praktische Probleme • Selbstwahrnehmung GPS, Orientierung, Kommunikation untereinander. • Umgebungswahrnehmung • Bildgewinnung, Bildanalyse, Bilderkennung Informatik WWU Münster / D. Lammers / HST-WiSe03
Hintergrund / Intention • Interessante theoretische Probleme: autonome Agenten in der (more or less) real world. Die gibt es in Zukunft immer mehr, sichtbar als Avatare (Telekom-Robert), oder unsichtbar als Helfer-Applikationen (mozilla spam filter) etc. Informatik WWU Münster / D. Lammers / HST-WiSe03
PseudoFussballer Informatik WWU Münster / D. Lammers / HST-WiSe03
PseudoFussballer Informatik WWU Münster / D. Lammers / HST-WiSe03
PseudoFussballer Informatik WWU Münster / D. Lammers / HST-WiSe03
PseudoFussballer Informatik WWU Münster / D. Lammers / HST-WiSe03
Danke für zuhören, und – cu? Informatik WWU Münster / D. Lammers / HST-WiSe03