Download
1 / 12
120 likes | 255 Views
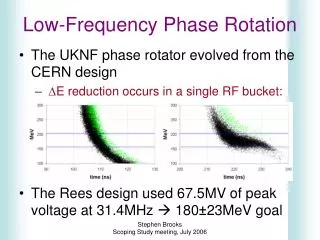
Proposal for Low frequency damping system in Tevatron. Why do we need it? Maybe not? Can our current correctors handle the job? How should the system look? Problems or issues?. Horizontal Beam motion. Beam Signal while cycling T:HA49 correctors at 15 Hz.

E N D
Proposal for Low frequency damping system in Tevatron • Why do we need it? Maybe not? • Can our current correctors handle the job? • How should the system look? • Problems or issues?
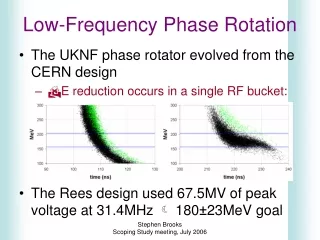
Since at 15 Hz we can generate a 174 micron kick we should Be able to generate at least a 131 micron amplitude kick at 20 Hz which is much stronger than the strongest signal of 32 microns observed at 12 Hz. So the correctors are able to damp all oscillations below 20 Hz if driven correctly.
How should the system look? B1 CDF D0 D1 Processing BPM 1 Corrector 1 BPM 2 Corrector 2
Algorithm for orbit correction Simulated beam response to applied kick 0.5 micro-rad kick of 20 Hz at D0 low beta quad as measured at A0 yield 30 micro-meter oscillations. Turn-by-turn (top) and frequency (bottom)
Simulated beam response with damping feedback turned on. Now beam motion down to < 2E-20 meters at A0. Turn-by-turn (top) and frequency (bottom). The correctors are running < 0.8 micro-rad which would require cycling correctors at .324 Amps much less than the 1.2 Amps we were able to produce at 15Hz. If quad motion was located at B0 the optics are very similar and simulations produce similar results.
A detail schematic of a single orbit correction node Beam sync trigger Sample And Hold Card Corrector 1 HB19 SUM BPM 1 HB11 Op-amp x A 1-200 Hz filter Op-amp x B Sample And Hold Card SUM Corrector 2 HB13 BPM 2 HB13 1-200 Hz filter Op-amp x C Op-amp x D A more detailed schematic of the damping system. Here Gains A,B and C are determined by the optics, voltage to position ratio of BPMs and voltage to Amp ratio for the correctors reference voltage. We have BPM transfer function of 12V/m, corrector transfer ratio of 2.54m-rad/Amp and controlled by reference voltage transfer function 5 Amps/volt. This gives a total BPM voltage to reference voltage multiplicative factor as (1/12)x(1/2.54E-6)x(1/5) = 6561.67. The optics factor are Fa=1.88E-5, Fb= -0.021, Fc= -0.039, and Fd=-2.371E-4. So a first estimate has A = 0.1233, B = -137.7, C = -255.9 and D = -1.555.
Current (Amps) Phase Diff. (degrees) 0.61637 38.817 0.738 40.738 1.2 54.842 Issues to worry about? Phase shift? Is this a real phase shift??? The snap shot time stamp says yes. But calculations from skin effect of stainless steel beam pipe say no.
assuming the harmonic time dependence exp[iwt] and the spatial dependence of exp[ikx] for a simple slab geometry. Where our wave number k can be approximated with With resistivity K become (1+i)*0.023√f . With a beam pipe thickness ~ .32 cm the phase shift becomes Or 1.63 degrees at 15 Hz.
Even if this does turn out to be a problem we can look to solutions used at The APS where a simple phase and amplitude compensation circuit are used to Compensate phase shifts due to electronic and skin effects of aluminum beam Pipe yielding phase shifts in excess of 90 degrees.