Download
1 / 26
260 likes | 359 Views
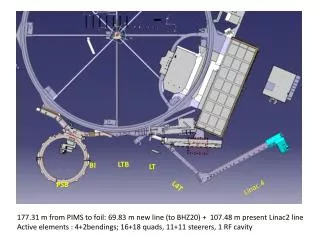
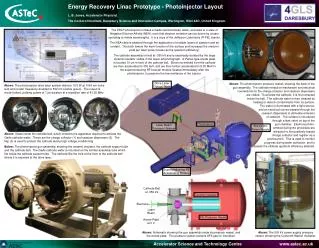
Energy Modulation in LINAC 4. Anirban Krishna Bhattacharyya , Philippe Baudrenghien CERN-BE-RF-FB. Reported by Anirban Krishna Bhattacharyya CERN-BE-RF-FB. Model/Simulation Parameters. Module 11/12. Debunching. ZTT = 25.5 M Ω /m L = 1.54 m/1.524 m Q 0 = 20000 β = 1.2

E N D
Energy Modulation in LINAC 4 Anirban Krishna Bhattacharyya, Philippe Baudrenghien CERN-BE-RF-FB Reported by Anirban Krishna Bhattacharyya CERN-BE-RF-FB
Model/Simulation Parameters Module 11/12 Debunching ZTT = 25.5 MΩ/m L = 1.54 m/1.524 m Q0 = 20000 β = 1.2 Φ = -20° Z0 = 50 Ω ZTT = 22.2 MΩ/m L = 1.548 m Q0 = 20100 β = 2.1 Φ = 90° Z0 = 50 Ω Triangular amplitude modulation in PIMS 11/12 with swing from 4.08 MV to 5.36 MV. Time periods: 20 μsec. Beam currents: 20 and 40 mA. Triangular phase modulation in debunching cavity with swing from -71.5° to 71.5°, -81.45° to 81.45° and -112° to 112° each with a voltage of 0.7 MV ± 25%. Time periods: 20 μsec. Beam currents: 20 and 40 mA. Klystron saturation limits are 1.1 MW, 1.3 MW and 75 KW respectively
Start-up conditions • 300 μsec are allowed for Low Level RF (LLRF) loops stabilization. The sequence leading to beam injection is as follows: • Filling of cavity open-loop using feed forward set point (SPFF ) for 50 μsec. This set point can be computed from the saturation power of the klystron and is given by • For the first 10 μsec of the process the feed forward set point value is ramped from 0 to SPFF. • The feed back is then switched on and for 50 μsecthe loop gains Kp and Ki are ramped to the desired values. The job of the controller is thus to follow the cavity • voltage set point by correcting for the error produced by the feed forward set point. • After 200 μsec the beam is injected. Vcav SPFF= Psat 1mW
Controller Gains The loop has a delay of 1.1 μsec arising from computation and cable lengths. This limits the gains of the controller. The Nyquist plots of the loop transfer function are shown below .
Controller Gains Gain margin ~ 10 dB Phase margin ~ 60° Loop gain = 3 Corner frequency = 35 KHz.
Conclusions • For a period of 20 μsec the klystron for the debuncher goes into saturation • with a limit of 75 KW. • For PIMS 11/12 the saturation is avoided with a cavity current of 20 mA and • a saturation limit of 1.3 MW. • Saturation can be avoided in all cases for a period of 40 μsec (results presented • in previous meeting) • Due to the delay the controller gain has to be limited which limits the ability to • track the set points. This needs to be corrected by the adaptive feedforward. • The controller gains can be pushed higher by taking into consideration the • differential gain of the loop around the operating point set by the feedforward.