Download
1 / 1
10 likes | 125 Views
Realistic Issues Using Centroidal Voronoi Tessellations for Multi-Agent Coordination. Authors Amanda Belleville Lacy Christensen The Center for Self-Organizing and Intelligent Systems (CSOIS) Utah State University, Logan, UT, USA acbelleville@gmail.com lacychristensen@hotmail.com.

E N D
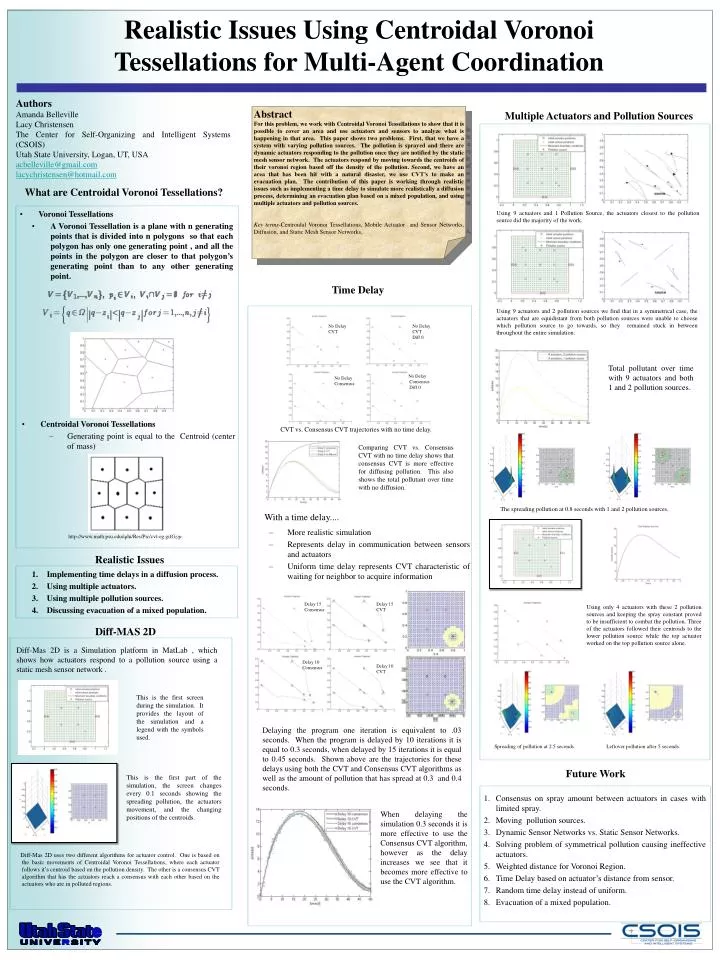
Realistic Issues Using Centroidal Voronoi Tessellations for Multi-Agent Coordination Authors Amanda Belleville Lacy Christensen The Center for Self-Organizing and Intelligent Systems (CSOIS) Utah State University, Logan, UT, USA acbelleville@gmail.com lacychristensen@hotmail.com Abstract For this problem, we work with Centroidal Voronoi Tessellations to show that it is possible to cover an area and use actuators and sensors to analyze what is happening in that area. This paper shows two problems. First, that we have a system with varying pollution sources. The pollution is sprayed and there are dynamic actuators responding to the pollution once they are notified by the static mesh sensor network. The actuators respond by moving towards the centroids of their voronoi region based off the density of the pollution. Second, we have an area that has been hit with a natural disaster, we use CVT’s to make an evacuation plan. The contribution of this paper is working through realistic issues such as implementing a time delay to simulate more realistically a diffusion process, determining an evacuation plan based on a mixed population, and using multiple actuators and pollution sources. Key terms-Centroidal Voronoi Tessellations, Mobile Actuator and Sensor Networks, Diffusion, and Static Mesh Sensor Networks, Multiple Actuators and Pollution Sources What are Centroidal Voronoi Tessellations? • Voronoi Tessellations • A Voronoi Tessellation is a plane with n generating points that is divided into n polygons so that each polygon has only one generating point , and all the points in the polygon are closer to that polygon’s generating point than to any other generating point. Using 9 actuators and 1 Pollution Source, the actuators closest to the pollution source did the majority of the work. Time Delay Using 9 actuators and 2 pollution sources we find that in a symmetrical case, the actuators that are equidistant from both pollution sources were unable to choose which pollution source to go towards, so they remained stuck in between throughout the entire simulation. No Delay CVT No Delay CVT Diff 0 Total pollutant over time with 9 actuators and both 1 and 2 pollution sources. No Delay Consensus Diff 0 No Delay Consensus • Centroidal Voronoi Tessellations • Generating point is equal to the Centroid (center of mass) CVT vs. Consensus CVT trajectories with no time delay. Comparing CVT vs. Consensus CVT with no time delay shows that consensus CVT is more effective for diffusing pollution. This also shows the total pollutant over time with no diffusion. The spreading pollution at 0.8 seconds with 1 and 2 pollution sources. With a time delay.... • More realistic simulation • Represents delay in communication between sensors and actuators • Uniform time delay represents CVT characteristic of waiting for neighbor to acquire information http://www.math.psu.edu/qdu/Res/Pic/cvt-eg.gifGzip. Realistic Issues • Implementing time delays in a diffusion process. • Using multiple actuators. • Using multiple pollution sources. • Discussing evacuation of a mixed population. Delay 15 Consensus Delay 15 CVT Using only 4 actuators with these 2 pollution sources and keeping the spray constant proved to be insufficient to combat the pollution. Three of the actuators followed their centroids to the lower pollution source while the top actuator worked on the top pollution source alone. Diff-MAS 2D Diff-Mas 2D is a Simulation platform in MatLab , which shows how actuators respond to a pollution source using a static mesh sensor network . Delay 10 Consensus Delay 10 CVT This is the first screen during the simulation. It provides the layout of the simulation and a legend with the symbols used. Delaying the program one iteration is equivalent to .03 seconds. When the program is delayed by 10 iterations it is equal to 0.3 seconds, when delayed by 15 iterations it is equal to 0.45 seconds. Shown above are the trajectories for these delays using both the CVT and Consensus CVT algorithms as well as the amount of pollution that has spread at 0.3 and 0.4 seconds. Spreading of pollution at 2.5 seconds. Leftover pollution after 5 seconds. Future Work This is the first part of the simulation, the screen changes every 0.1 seconds showing the spreading pollution, the actuators movement, and the changing positions of the centroids. • Consensus on spray amount between actuators in cases with limited spray. • Moving pollution sources. • Dynamic Sensor Networks vs. Static Sensor Networks. • Solving problem of symmetrical pollution causing ineffective actuators. • Weighted distance for Voronoi Region. • Time Delay based on actuator’s distance from sensor. • Random time delay instead of uniform. • Evacuation of a mixed population. When delaying the simulation 0.3 seconds it is more effective to use the Consensus CVT algorithm, however as the delay increases we see that it becomes more effective to use the CVT algorithm. Diff-Mas 2D uses two different algorithms for actuator control. One is based on the basic movements of Centroidal Voronoi Tessellations, where each actuator follows it’s centroid based on the pollution density. The other is a consensus CVT algorithm that has the actuators reach a consensus with each other based on the actuators who are in polluted regions.