Download
1 / 1
20 likes | 175 Views
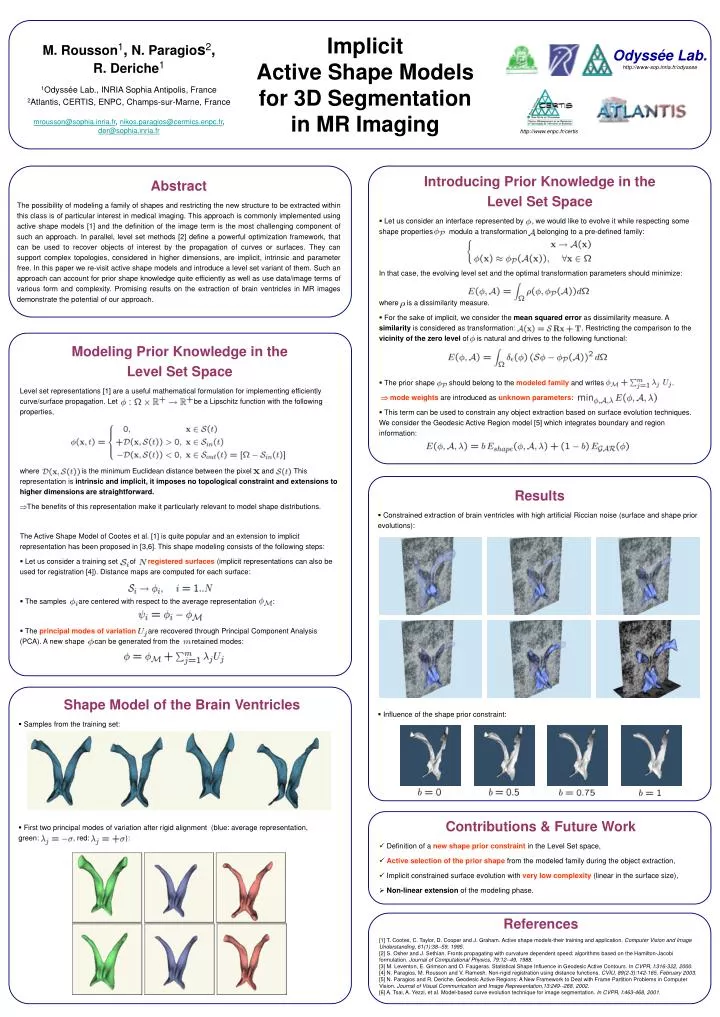
Implicit Active Shape Models for 3D Segmentation in MR Imaging. M. Rousson 1 , N. Paragio s 2 , R. Deriche 1 1 Odyssée Lab., INRIA Sophia Antipolis, France 2 Atlantis, CERTIS, ENPC, Champs-sur-Marne, France mrousson@sophia.inria.fr , nikos.paragios@cermics.enpc.fr , der@sophia.inria.fr.

E N D
Implicit Active Shape Models for 3D Segmentation in MR Imaging M. Rousson1, N. Paragios2,R. Deriche1 1Odyssée Lab., INRIA Sophia Antipolis, France 2Atlantis, CERTIS, ENPC, Champs-sur-Marne, France mrousson@sophia.inria.fr, nikos.paragios@cermics.enpc.fr, der@sophia.inria.fr Odyssée Lab.http://www-sop.inria.fr/odyssee http://www.enpc.fr/certis • Introducing Prior Knowledge in the Level Set Space • Let us consider an interface represented by , we would like to evolve it while respecting some shape properties modulo a transformation belonging to a pre-defined family:In that case, the evolving level set and the optimal transformation parameters should minimize: where is a dissimilarity measure. • For the sake of implicit, we consider the mean squared error as dissimilarity measure. A similarity is considered as transformation: . Restricting the comparison to the vicinity of the zero level of is natural and drives to the following functional: • The prior shape should belong to the modeled family and writes . mode weights are introduced as unknown parameters: • This term can be used to constrain any object extraction based on surface evolution techniques. We consider the Geodesic Active Region model [5] which integrates boundary and region information: Abstract The possibility of modeling a family of shapes and restricting the new structure to be extracted within this class is of particular interest in medical imaging. This approach is commonly implemented using active shape models [1] and the definition of the image term is the most challenging component of such an approach. In parallel, level set methods [2] define a powerful optimization framework, that can be used to recover objects of interest by the propagation of curves or surfaces. They can support complex topologies, considered in higher dimensions, are implicit, intrinsic and parameter free. In this paper we re-visit active shape models and introduce a level set variant of them. Such an approach can account for prior shape knowledge quite efficiently as well as use data/image terms of various form and complexity. Promising results on the extraction of brain ventricles in MR images demonstrate the potential of our approach. • Modeling Prior Knowledge in the Level Set Space Level set representations [1] are a useful mathematical formulation for implementing efficiently curve/surface propagation. Let be a Lipschitz function with the following properties, where is the minimum Euclidean distance between the pixel and . This representation is intrinsic and implicit, it imposes no topological constraint and extensions to higher dimensions are straightforward. • The benefits of this representation make it particularly relevant to model shape distributions. The Active Shape Model of Cootes et al. [1] is quite popular and an extension to implicit representation has been proposed in [3,6]. This shape modeling consists of the following steps: • Let us consider a training set of registered surfaces (implicit representations can also be used for registration [4]). Distance maps are computed for each surface: • The samples are centered with respect to the average representation : • The principal modes of variation are recovered through Principal Component Analysis (PCA). A new shape can be generated from the retained modes: • Results • Constrained extraction of brain ventricles with high artificial Riccian noise (surface and shape prior evolutions): • Influence of the shape prior constraint: • Shape Model of the Brain Ventricles • Samples from the training set: • First two principal modes of variation after rigid alignment (blue: average representation, green: , red: ): • Contributions & Future Work • Definition of a new shape prior constraint in the Level Set space, • Active selection of the prior shape from the modeled family during the object extraction, • Implicit constrained surface evolution with very low complexity (linear in the surface size), • Non-linear extension of the modeling phase. References [1] T. Cootes, C. Taylor, D. Cooper and J. Graham. Active shape models-their training and application. Computer Vision and Image Understanding, 61(1):38--59, 1995.[2] S. Osher and J. Sethian. Fronts propagating with curvature dependent speed: algorithms based on the Hamilton-Jacobi formulation. Journal of Computational Physics, 79:12--49, 1988.[3] M. Leventon, E. Grimson and O. Faugeras. Statistical Shape Influence in Geodesic Active Contours. In CVPR, I:316-322, 2000.[4] N. Paragios, M. Rousson and V. Ramesh. Non-rigid registration using distance functions. CVIU, 89(2-3):142-165, February 2003. [5] N. Paragios and R. Deriche. Geodesic Active Regions: A New Framework to Deal with Frame Partition Problems in Computer Vision. Journal of Visual Communication and Image Representation,13:249--268, 2002.[6] A. Tsai, A. Yezzi, et al. Model-based curve evolution technique for image segmentation. In CVPR, I:463-468, 2001.