Download
1 / 39
500 likes | 1.32k Views
The Physics Of Bicycles. Daniel Eley. First chain driven bicycle introduced in 1885 Structure hasn’t changed much How do they work?. Lance Armstrong’s 2004 Tour de France bike. John Starley’s “Rover” of 1885. Topics of Discussion. Why does the bike move forward when I pedal?

E N D
The Physics Of Bicycles Daniel Eley
First chain driven bicycle introduced in 1885 • Structure hasn’t changed much • How do they work? Lance Armstrong’s 2004 Tour de France bike John Starley’s “Rover” of 1885
Topics of Discussion • Why does the bike move forward when I pedal? • What are gear ratios? • What determines a bike’s stability?
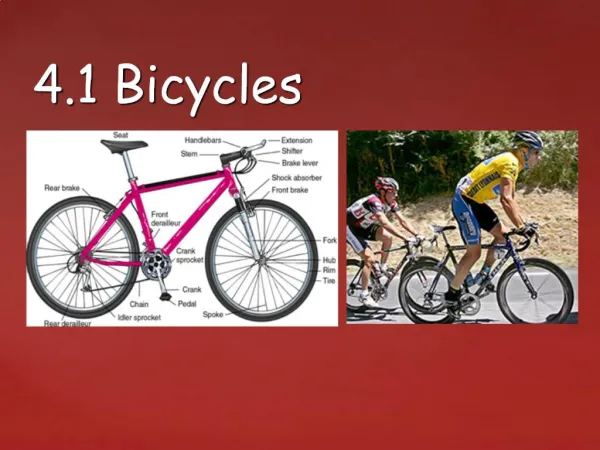
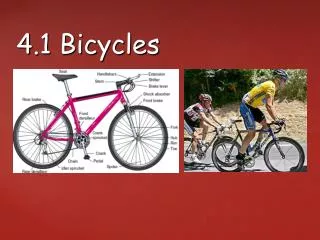
A Moving Bicycle R = radius of the tires w = angular velocity of the tires r1 = radius of the sprocket r2 = radius of the chainring N1 = normal force N2 = normal force M = total mass of bicycle and rider p = length of pedal arm F = force applied vertically at a right angle to the pedal arm F1 = reactive push backwards from ground F2 = drive force forwards due to torque from pedaling
We know… Fnet x = Ma (where a is the tangential acceleration) a = aR (where a is the angular acceleration of the tires) F2 – F1 = Fnet x Therefore… F2 – F1 = MRa (1)
tnet = Ia (where t is the torque and I is the moment of inertia of the back tire) Fp(r1/r2) – F2R = Ia (2) If we assume that the moment of inertia of the front wheel is roughly the same as the back wheel, then we can say… F1R = Ia (3) We combine equations 1,2, and 3 eliminating F1 and F2 Fp(r1/r2) = a(2I + MR2)
Using this equation and a=Ra, the bicycle’s linear acceleration is: a = RFp(r1/r2) (2I+MR2) (4) the smaller the gear ratio (r2/r1), the larger the acceleration So why don’t all bikes have a small r2/r1 ratio?
angular velocity of the sprocket (r1) be w1 (also equal to w) • angular velocity of the chainring (r2) be w2 • the velocity of the foot applied to the pedal is… vapp = pw2 or w2 = vapp /p The velocity of the bike is… vb = Rw = Rw1 = w2(r2/r1)R Substituting vapp /p for w2 and rearranging gives us… vb / vapp = r2R/r1p
vb / vapp = (r2/r1)R/p (6) • to maintain a constant velocity (vb), and a minimum vapp, you would want a large gear ratio (r2/r1). • But as we saw in eq. 4, for a higher acceleration, you want a small gear ratio (r2/r1). • How do you give riders both? • Multiple sprockets or gears
Bicycle Gearing • The gearing on a bicycle is the selection of appropriate gear ratios for optimum efficiency or comfort. • The gear ratio is the ratio of the number of teeth on the chainring of the crankset to the teeth on the rear sprocket. • Different gears are used for different circumstances.
Cadence - number of revolutions the crank is moved per minute • The average recreational cyclist has a cadence of 60-80 rpm • The average racing cyclist has a cadence of 80-120 rpm (Lance Armstrong’s cadence is 120 rpm) • Gear ratios allow optimal cadence in any terrain • Elevated ground means more force is required to move the bike forward
Harder to turn the pedals on elevated ground – lower cadence • In order to maintain the same cadence, switch to lower gear • We proved earlier that to get a higher acceleration, you needed a smaller gear ratio. • F=ma; smaller gear ratio will also result in a higher force output (per amount of force input). • Elevated slope: need higher output force, same applied force to the pedals, same cadence. That means a smaller gear ratio. • Downhill slope: need a smaller output force, so we need a higher gear ratio. • Higher gear ratio: achieve higher vb while maintaining the same vapp.
Multi-speed bicycles allow gear selection: • Downhill = High gear • Flat ground = Medium gear • Uphill = Low gear • You can calculate the equivalent wheel size using the gear ratio. • Equivalent wheel size = gear ratio x wheel diameter. • Ex. if you had a gear ratio of 4.0 and a wheel diameter of 27”, then the equivalent wheel size would be 108”. • That means that using a gear ratio of 4.0 on a bike with a wheel diameter of 27” is the same as riding a direct-drive wheel with a diameter of 108”. Penny-Farthing (direct-drive)
Determine distance traveled from each turn of pedals using equivalent wheel size. • Distance traveled = circumference of equivalent wheel • For our previous example, the distance traveled for each turn of the pedals would be: • p(108”) = 339.3” or 28.3 ft. • If it was a direct-drive wheel, each turn of the pedals would take you: • p(27”) = 84.8” or 7.1 ft. • Much greater rpm’s of the bike tires at maximum cadence
How can a bicycle have multiple gear ratios available? • Two types of bicycle gears: hub gears and derailleur gears. Derailleur Gear Hub Gear
Derailleur Gears • A transmission system consisting of a chain, multiple sprockets, and a mechanism (derailleur) to shift the chain from one sprocket to another (more common than hub gears). • Move lever on handlebar, changes tension in derailleur cable. • Change in tension moves derailleur to one side or the other moving the chain from one sprocket to another. • There are two pulleys: the guide pulley and the tension pulley. Guide pulley pushes chain from one sprocket to the other. The tension pulley maintains tension in the chain.
Hub Gears • Work by epicyclic gearing: outer casing (which is connected to the spokes of the wheel) rotates at different speeds depending on which gear is chosen. • gears enclosed in hub, protecting them. • Used mostly for utility bicycles
Advantages • Mechanism is enclosed within the hub, so it is not exposed to dirt or weather. Hub gears need very little maintenance and are very reliable. • The gear can be changed when the bike is stationary. (city traffic-starts/stops) Disadvantages • Limited space available in the hub, smaller range of gears than derailleurs. • They’re heavier and more expensive than derailleur gears.
Gear Ratios Rear Sprocket Radius (r1) (cm)
F2/Fapp (N) Rear Sprocket Radius (r1) (cm)
Calculating the acceleration for the bike • Measured out 22 m • Started from rest and timed how long it took to go 22 m. Motion equation: Dx = v0t + ½(at2) • v0 = 0 • a = 2Dx/t2
Acceleration (m/s2) Rear Sprocket Radius (r1) (cm)
Stability • Prior to the work of David E. H. Jones and his famous “unridable bicycles”, there were two main theories on why bicycles are so stable. • Front fork swivel and skill of rider • Gyroscopic effects • Jones found faults in both theories, and proposed his own theory, which is now widely accepted by physicists.
First theory: ridability depends on the freedom of the front forks to swivel and the skill of the rider. • Falling bicycle can be saved by proper steering of the front wheel. • Bike is easier to ride the faster it is moving - a smaller steering change is needed to create the centrifugal correction • Centrifuge – inertia of bike and friction of tires cause torque • Stationary bike impossible to balance • Faults: when you push a bike it will travel a long time riderless before falling over (as opposed to the second or two it takes to fall over when it is stationary).
Second theory: gyroscopic effects from front wheel. • The angular momentum of the wheel is L=Iw • L is in same direction as the angular velocity, w, which equals v x r. • As long as the bicycle is going straight, the angular momentum stays in the same position.
If the rider leans left, a torque will be produced which causes a counterclockwise precession of the bicycle wheel, tending to turn the bicycle to the left. (Demo) • t = r x F • The torque produced by leaning left points to the rear of the bike. • Torque is always perpendicular to angular momentum (L), and it causes the angular momentum to change in the direction of the torque vector. • Angular momentum is in the same direction as the axis of rotation for the wheel, so if the direction of L shifts backwards, so does the axis of rotation, turning the wheel left (Demo – volunteer)
David E. H. Jones: non-gyroscopic bicycle (URB 1). • second wheel on front fork (clear of the ground) - spun in opposite direction of real front wheel, opposing the gyroscopic effect. • Fell quickly when pushed rider less • Still able to ride it (above photo). • Proved gyroscopic effects of the front wheel weren’t a significant contributor to the stability of the bicycle (when rider is present). • Mass of the wheel is so much less than the mass of the bicycle and rider that the gyroscopic effects are too small to really matter (weight of racing bike =15 lb) • This effect is more important at higher speeds (motorcycles)
So what causes the bicycle to be so stable? • Trail. • If you push a bike backwards it will fall over – the two wheels follow separate paths. • If you push the bike forwards, the two wheels follow the same path. • Trailing frame and back wheel will swing into line behind the front wheel. • It isn’t the front wheel straightening out, it’s the back of the bike swinging into line.
Caster wheels on a shopping cart. If you push the cart, the forks of the wheels flip around backwards, and the wheels “trail” the cart. • A bicycle’s fork always points forward. • bicycle wheel’s contact point with the ground trails the steering axis intersection with the floor (like caster). • Pivot point is in front of the place where the tire touches the ground, the frictional drag of the tire tends to keep the wheel straight ahead (like the caster wheel). • Pull bike backwards, the wheel wants to turn around
The difference in the wheel contact point and the steering axis is referred to as the fork trail of the bicycle, -determines bike’s stability. • Larger fork trail = more stable bike. • If the bicycle leans to the right, the normal force of the road on the bicycle tire moves to the left side of the bicycle and deviates from the steering axis. This turns the wheel to the right, steering the bicycle to the side that is required to keep the bicycle from falling over. • The greater the fork trail, the greater this effect.
Since bicycles are balanced on two wheels in a line in an unstable equilibrium, they must start to fall to one side or the other. • A bicycle is stable when it automatically tends to correct for this unwanted lean. • Since a larger trail means that the front wheel will turn more sharply to correct a lean faster, then a larger trail means that the bicycle is more stable.
Jones proved his trail theory with two of his “unridable bikes” (URB III and the URB IV) • URB III had the fork turned around, (trail much larger). • URB III was the most stable bicycle that Jones tested, actively righting itself even without a rider. • Overcorrected the lean at each weave until it ran out of speed and collapsed. • Traveled much farther, rider less, than the same bike with the fork forward (less trail). URB III
The URB IV was the most unstable bicycle that Jones created. • He moved the front wheel four inches ahead of its normal position, creating a negative trail. • The bicycle fell over immediately when released rider less, and Jones described it as “very dodgy to ride.” • Why is negative trail less stable? • Demo URB IV
So if making the trail larger makes the bike more stable, why don’t all bikes have a large trail? • Large trail = hard to maneuver. • A bike that is too stable is sluggish to turn and respond to the rider’s movements. • Great for going straight, but turning is difficult • Most modern bikes have relatively small trails, making them less stable but more responsive. Mountain bike - notice the large fork rake, making the trail small.
We know trail affects stability • How do you change trail (T)? • There are three components to trail: • q = head angle, R = fork rake, r = radius of wheel • Head angle and wheel radius are usually fixed • To change Trail, change fork rake • Bigger fork rake = smaller trail
Why Study Bicycles? • When buying a bicycle, you will have to answer the following questions: • Do I want a large or small fork rake? • Do I want hub gears or derailleur gears? • What combinations of gear ratios do I want? • Become an informed shopper. • Design the bike that is best for your needs.
The Wright Brothers’ pre-aeronautical profession was bicycle repair and manufacture. • They used a number of concepts they had learned from bicycles when they were building their plane: • The central importance of balance and control. • The need for strong but lightweight structures. • The chain-and-sprocket transmission system for propulsion. • Concerns regarding wind resistance and aerodynamic shape of the operator
More than $3.5 million was up for grabs this year at the tour de France, not including the millions of dollars in endorsements. • Every rider had a dedicated team trying to create the “best” bicycle. • Armstrong used different parts for different days, depending on the terrain. • Changed out his gears and wheels each day to fit the terrain for the day • Physics led to his 6th tour de France victory • Would have lost riding the 1885 “Rover”
Sources • Forester, John; “Report on Stability of the Da Hon Bicycle”. • Jones, David E. H. (1970). The Stability of the Bicycle • Leisegang, L. and Lee, L. R. Dynamics of a bicycle; nongyroscopic aspects;American Journal of Physics -- February 1978 -- Volume 46, Issue 2, pp. 130-132 • Peterson, Dr. Randolph • Popular Mechanics; “Wheels of Fortune”; Wendy Booher • http://en.wikipedia.org/wiki/Bicycle • http://www.segway.com/segway/how_it_works.html • http://hyperphysics.phy-astr.gsu.edu/hbase/mechanics/bicycle.html#c3 • Zinn, Lennard; Zinn’s Cycling Primer; Block 40.