Download
1 / 13
220 likes | 599 Views
Line Segment Intersection. M otivation: Computing the overlay of several maps The Sweep -Line-P aradigm: A visibility problem L ine S egment Intersection The D oubly Connected E dge L ist Computing boolean operations on p olygon s. Maps. river. road. overlaid maps.

E N D
Line Segment Intersection • Motivation: Computing the overlay of several maps • The Sweep-Line-Paradigm: A visibilityproblem • Line Segment Intersection • The Doubly Connected Edge List • Computing boolean operations on polygons Computational Geometry Prof.Dr.Th.Ottmann
Maps Computational Geometry Prof.Dr.Th.Ottmann
river road overlaid maps Motivation Thematic map overlay in Geographical Information Systems 1. Thematic overlays provide important information. 2. Roads and rivers can both be regarded as networks of line segments. Computational Geometry Prof.Dr.Th.Ottmann
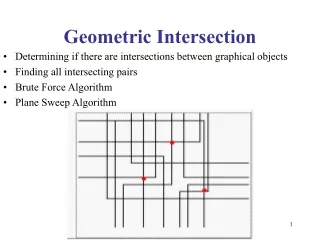
Problem definition Input: SetS={s1...,sn } of n closed line segmentssi={(xi, yi), (x´i, y´i)} Output: All intersection points among the segments in S The intersection of two lines can be computed in time O(1). Computational Geometry Prof.Dr.Th.Ottmann
Naive algorithm Goal: Output sensitive algorithm! Computational Geometry Prof.Dr.Th.Ottmann
D C F G B A H E The Sweep-Line-Paradigm: A visibilityproblem Input: Set of n vertcal line segments Output: All pairs of mutually visible segments Naive method: Observation: Two line segments s and s´ are mutually visible iff there is a y such that s and s´are immediate neighbors at y. Computational Geometry Prof.Dr.Th.Ottmann
Q T • .H H • .D D!H • .A A!DH • .F A!D!F!H • .C A!C!DFH • .E ACD!E!FH • AC!EFH • .G ACEF!G!H • .B A!B!CEFGH • ABCE!GH • AB!EGH • :: : : : Sweep line algorithm Qissetof the start and end points of the segments in decreasing y-order T is set of the active line segments D C F B A H E G Computational Geometry Prof.Dr.Th.Ottmann
Algorithm Initialise Q as set of start and endpoints of segments in decreasing y-order; Initialise the set of active segments T = ; while Q do p = Q.Min; remove p from Q; if (p start point of segment s) T = T {s}; determine neighbors s´and s´´ of s; report (s, s´) and (s,s´´) as visible pairs else /* p is end point of segment s */ determine neighbors s´and s´´ of s; report (s´, s´´) as visible pair;T = T - {s} Computational Geometry Prof.Dr.Th.Ottmann
Sweep Line principle Imaginary linemoves in y direction. Each point is anevent. Input: A set of (iso-oriented objects) Output: Problem-dependent Q:object and problem-dependant queue of event points T: ordered set of the active objects /* status structure */ whileQdo select next event point from Q and remove it from Q; update(T); report problem-dependent result Computational Geometry Prof.Dr.Th.Ottmann
Data structures: event queue Operations to be supported: Initialisation, min, deletion of points, Possible implementation: Balanced search tree of points with order p < q py < qy or (py = qy and px < qx) Initialisation takes time O(m log m) for m items. Deletion takes time O(log m)with m items in queue. In most cases a priority queue supporting insertion and min-removal (eg. heap, O(m),O(log m), for initialisation and min-removal) is enough . Computational Geometry Prof.Dr.Th.Ottmann
k l k i m j i l l i m j j k Data structures: status structure Operations to be supported: Insertion, deletion, searching for neighbors Possible implementation: Balanced search tree, O(log n) time Node values (keys) are used for routing Computational Geometry Prof.Dr.Th.Ottmann
Runtime analysis Initialise Q as set of start and endpoints of segments in decreasing y-order; Initialise the set of active segments T = ; while Q do p = Q.Min; remove p from Q; if (p start point of segment s) T = T {s}; determine neighbors s´and s´´ of s; report (s, s´) and (s,s´´) as visible pairs else /* p is end point of segment s */ determine neighbors s´and s´´ of s; report (s´, s´´) as visible pair;T = T - {s} Computational Geometry Prof.Dr.Th.Ottmann
Summary Theorem: For a given set of n vertical line segments all k pairs of mutually visible segments can be reported in time O(n log n). Note: k is O(n) Computational Geometry Prof.Dr.Th.Ottmann