Download
1 / 29
290 likes | 484 Views
Tracking, Motion Generation and Active Sensing of Nonholonomic Wheeled Mobile Robots Lyudmila Mihaylova Katholieke Universiteit Leuven. Content Holonomic and nonholonomic robots Basic methods for tracking tasks Motion generation Active sensing.

E N D
Tracking, Motion Generation and Active Sensing of Nonholonomic Wheeled Mobile RobotsLyudmila MihaylovaKatholieke Universiteit Leuven Content Holonomic and nonholonomic robots Basic methods for tracking tasks Motion generation Active sensing
What Distinguishes a Nonholonomic System From a Holonomic System? • With a holonomic system, return to the original joint configuration means return to the original position. For a nonholonomic system, return to the original wheelconfiguration does not guarantee return to the original system position. • The motion of a nonholonomic robot is path-dependent. Lyudmila Mihaylova, Katholieke Universiteit Leuven, Division PMA
Tracking the WMR motion • Tracking: a wheeled mobile robot (WMR) is moving in an environment (known, or unknown, with or without obstacles) and its motion is tracked using the sensor data; • Basic methods:Kalman filtering techniques (linear and EKFs, multiple-model estimators), Monte Carlo methods (bootstrap, Gibbs samplers, particle filters, unscented particle filters), derivative-free algorithms, Daum filters, etc. • New advanced methods are needed to cope with the 3N: nonlinearity, nonstationarity, non Gaussianity. Lyudmila Mihaylova, Katholieke Universiteit Leuven, Division PMA
Motion generation • Main motion tasks : control problem U = ? * Point-to-point motion : the robot must reach a desired goal configuration starting from a given initial configuration. * Trajectory tracking: a motion should be generated so that the WMR reaches and follows a trajectory in the Cartesian space (i.e. a geometric path with an associated timing law) starting from a given initial configuration (on or off the trajectory). http://www.laas.fr/~jpl/book.html : J.-P. Laumond, Robot Motion Planning, Springer-Verlag, 1998. A. De Luca, G. Oriolo, and M. Vendittelli, Control of Mobile Robots, An Experimental Overview, Springer-Verlag, 2001
Main Motion Generation Tasks I. Point-to-point motion II. Trajectory tracking Lyudmila Mihaylova, Katholieke Universiteit Leuven, Division PMA
Open area of research due to ... • The nonholonomic character of the systems: the dimension of the controls is less than the dimension of the configurable variables (states). The main consequence of a nonholonomic constraint is that not each path from the admissible configura- tion space corresponds to a feasible trajectory for the robot. • The task solution is dependent on the optimality criterion. It should be such that maximum information is extracted from the sensor data and at the same time processed in a computational- ly efficient way. • It is related to the computational load (time, number of operations). The generated motions are needed to be executed on line. Lyudmila Mihaylova, Katholieke Universiteit Leuven, Division PMA
Open area of research due to... • The nonlinear character of the problem poses questions about the system controllability. The main methods deal with special classes of nonholonomic systems. The nonlinear model is reduced to a linear, easier to deal with (chained forms, Goursat normal forms or other linear representations); • Obstacles avoidance adds additional level of difficulty. Often solutions in this case rely on a combination between geometric techniques for obstacles avoidance with advanced control techniques. Steering methods rely on topological properties of the environment map or other learning techniques. • Other uncertainties (in the model, sensor data, etc.) Lyudmila Mihaylova, Katholieke Universiteit Leuven, Division PMA
Active Sensing The main question to answer:”Where to move next?” Given a current knowledge about the robot state and the environment, how to select the next sensing action or sequence of actions. A vehicle is moving autonomously through an environment gathering information from sensors. The sensor data are used to generate the robot actions. Beginning from a starting configuration (xs,ys,s) to a goal configuration (xg,yg,g) in the presence of a reference trajectory and without it; With and without obstacles; Taking into account the constraints on the velocity, steering angle, the obstacles, and other constraints … Lyudmila Mihaylova, Katholieke Universiteit Leuven, Division PMA
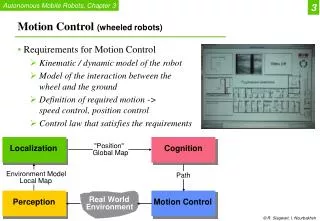
Active Sensing of a WMR Robot model Measurement model Highly nonlinear models !
Trajectory optimization • Between two points there are an infinite number of possible trajectories. But not each trajectory from the configuration space represents a feasible trajectory for the robot. • How to move in the best way according to a criterion from the starting to a goal configuration? • The key idea is to use some parameterized family of possible trajectories and thus to reduce the infinite-dimensional problem to a finitely parametrized optimization problem. To characterize the robot motion and to process the sensor information in efficient way, an appropriate criterion is need. So, active sensing is a decision making, global optimization problem sub- ject to constraints. Lyudmila Mihaylova, Katholieke Universiteit Leuven, Division PMA
Trajectory Optimization • Let Q is a class of smooth functions. The problem of determining the ‘best’ trajectory q with respect to a criterion J can be then formulated as q = argmin(J) where the optimization criterion is chosen of the form information part losses (time, traveled distance) subject to constraints l: lateral deviation, v: WMR velocity; : steering angle; d : distance to obstacle
Trajectory Optimization The class Q of harmonic functions is chosen, Q = Q(p), p: vector of parameters obeying to preset constraints; Given N number of harmonic functions, the new modified robot trajectory is generated on the basis of the reference trajectory by a lateral deviation as a linear superposition Lyudmila Mihaylova, Katholieke Universiteit Leuven, Division PMA
Why harmonic functions? • They are smooth periodic functions; • Gives the possibility to move easily the robot to the desired final point; • Easy to implement; • Multisinusoidal signals are reach excitation signals and often used in the experimental identification. They have proved advantages for control generation of nonholonomic WMR (assure smooth stabilization). For canonical chained systems Brockett (1981) showed that optimal inputs are sinusoids at integrally related frequencies, namely 2, 2. 2, …, m/2. 2. Lyudmila Mihaylova, Katholieke Universiteit Leuven, Division PMA
Optimality Criterion I = trace(WP), or averaged I is computed at the goal configuration or on the the whole trajectory (part of it, e.g. in an interval ) where W = MN; M: scaling matrix; N: normalizing matrix: P: estimation error covariance matrix (information matrix or entropy) from a filter (EKF);
Trajectory (N=2 sinusoids) Lyudmila Mihaylova, Katholieke Universiteit Leuven, Division PMA
Trajectory (N=3 sinusoids) Lyudmila Mihaylova, Katholieke Universiteit Leuven, Division PMA
Trajectory (N=5 sinusoids) Lyudmila Mihaylova, Katholieke Universiteit Leuven, Division PMA
Evolution of trace(WP) in time Lyudmila Mihaylova, Katholieke Universiteit Leuven, Division PMA
Criterion value at the goal configuration Lyudmila Mihaylova, Katholieke Universiteit Leuven, Division PMA
With an obstacle Lyudmila Mihaylova, Katholieke Universiteit Leuven, Division PMA
Trajectories with constraint on the orientation angle Lyudmila Mihaylova, Katholieke Universiteit Leuven, Division PMA
The information criterion I1 Lyudmila Mihaylova, Katholieke Universiteit Leuven, Division PMA
Trajectories with constraint on the orientation angle and I2 Lyudmila Mihaylova, Katholieke Universiteit Leuven, Division PMA
The information criterion I2 Lyudmila Mihaylova, Katholieke Universiteit Leuven, Division PMA
Point-to-point optimization Lyudmila Mihaylova, Katholieke Universiteit Leuven, Division PMA
Implementation • Using Optimization Toolbox of MATLAB, • fmincon finds the constrained minimum of a function of several variables • With small number of sinusoids (N<5) the computational complexity is such that it is easily implemented on-line. With more sinusoidal terms (N>10), the complexity (time, number of computations) is growing up and a powerful computer is required or off-line computation. All the performed experiments prove that the trajectories generated even with N=3 sinusoidal terms respond to the imposed requirements. Lyudmila Mihaylova, Katholieke Universiteit Leuven, Division PMA
Conclusions An effective approach for trajectories optimization has been considered : • with and without a reference trajectory; • with one and more beacons; • Appropriate optimality criteria are defined. The influence of the different factors is decoupled; • The approach is applicable in the presence of and without obstacles. Lyudmila Mihaylova, Katholieke Universiteit Leuven, Division PMA
Further research • Active sensing without a reference trajectory, when taking into account the topology of the obstacles, with unknown environment; • With other performance criteria; • Trajectories searched within other classes of functions with appealing properties; • For other robotic systems (nonholonomic and holonomic); • With real data from robots. Lyudmila Mihaylova, Katholieke Universiteit Leuven, Division PMA