Download
1 / 1
10 likes | 148 Views
Collaborative Exploration with. Challenges of Robotics. 3. 4. 5. 2. Future Objectives. Exploration. 6. 1. Beacon Robot. Beacon Robot. Autonomous Robots. Project Overview.

E N D
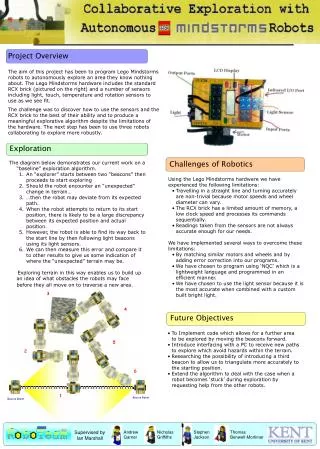
Collaborative Exploration with Challenges of Robotics 3 4 5 2 Future Objectives Exploration 6 1 Beacon Robot Beacon Robot Autonomous Robots Project Overview The aim of this project has been to program Lego Mindstorms robots to autonomously explore an area they know nothing about. The Lego Mindstorms hardware includes the standard RCX brick (pictured on the right) and a number of sensors including light, touch, temperature and rotation sensors to use as we see fit. The challenge was to discover how to use the sensors and the RCX brick to the best of their ability and to produce a meaningful explorative algorithm despite the limitations of the hardware. The next step has been to use three robots collaborating to explore more robustly. • The diagram below demonstrates our current work on a “baseline” exploration algorithm. • An “explorer” starts between two “beacons” then proceeds to start exploring • Should the robot encounter an “unexpected” change in terrain… • …then the robot may deviate from its expected path. • When the robot attempts to return to its start position, there is likely to be a large discrepancy between its expected position and actual position. • However, the robot is able to find its way back to the start line by then following light beacons using its light sensors. • We can then measure this error and compare it to other results to give us some indication of where the “unexpected” terrain may be. • Exploring terrain in this way enables us to build up an idea of what obstacles the robots may face before they all move on to traverse a new area. • Using the Lego Mindstorms hardware we have experienced the following limitations: • Travelling in a straight line and turning accurately are non-trivial because motor speeds and wheel diameter can vary. • The RCX brick has a limited amount of memory, a low clock speed and processes its commands sequentially. • Readings taken from the sensors are not always accurate enough for our needs. • We have implemented several ways to overcome these limitations: • By matching similar motors and wheels and by adding error correction into our programs. • We have chosen to program using ‘NQC’ which is a lightweight language and programmed in an efficient manner. • We have chosen to use the light sensor because it is the most accurate when combined with a custom built bright light. • To Implement code which allows for a further area to be explored by moving the beacons forward. • Introduce interfacing with a PC to receive new paths to explore which avoid hazards within the terrain. • Researching the possibility of introducing a third beacon to allow us to triangulate more accurately to the starting position. • Extend the algorithm to deal with the case when a robot becomes ‘stuck’ during exploration by requesting help from the other robots. Supervised by Ian Marshall Andrew Garner Nicholas Griffiths Stephen Jackson Thomas Benwell-Mortimer