Download
1 / 1
10 likes | 107 Views
AsasF (2005 – 2008) Controlo cooperativo de veículos aéreos autónomos Coordenadores: Gil Manuel Gonçalves (DEEC), João Borges de Sousa (DEEC), Fernando Lobo Pereira (DEEC), António Torres Marques (DEMEGI). Objectivos: 3 veículos aéreos não tripulados em operação coordenada

E N D
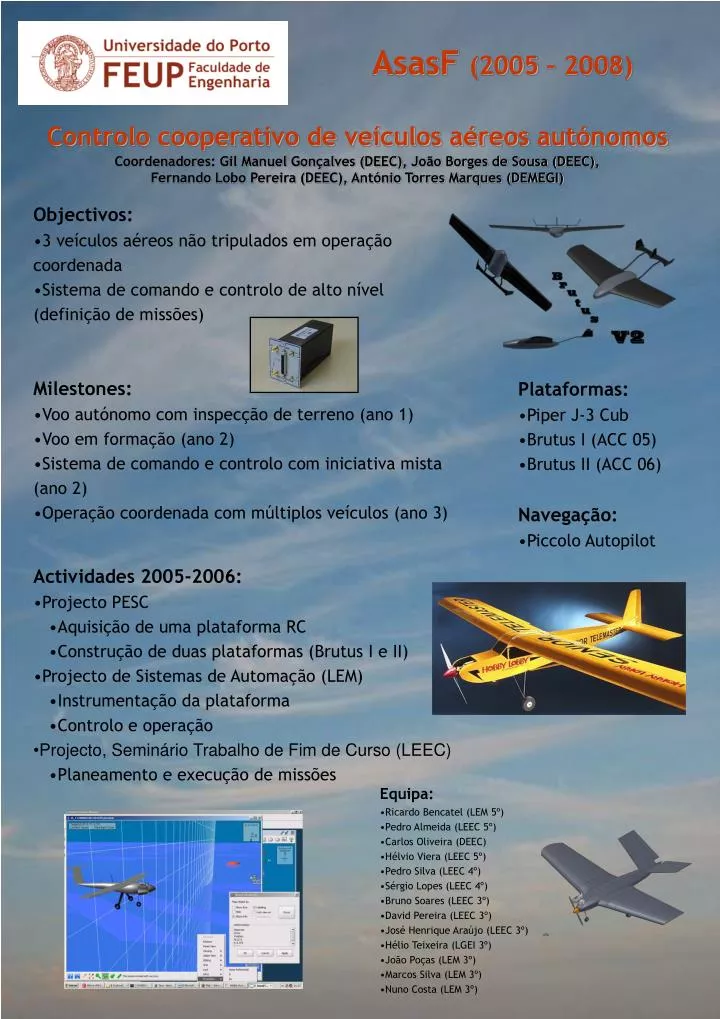
AsasF (2005 – 2008)Controlo cooperativo de veículos aéreos autónomosCoordenadores: Gil Manuel Gonçalves (DEEC), João Borges de Sousa (DEEC),Fernando Lobo Pereira (DEEC), António Torres Marques (DEMEGI) • Objectivos: • 3 veículos aéreos não tripulados em operação coordenada • Sistema de comando e controlo de alto nível (definição de missões) • Milestones: • Voo autónomo com inspecção de terreno (ano 1) • Voo em formação (ano 2) • Sistema de comando e controlo com iniciativa mista (ano 2) • Operação coordenada com múltiplos veículos (ano 3) • Plataformas: • Piper J-3 Cub • Brutus I (ACC 05) • Brutus II (ACC 06) • Navegação: • Piccolo Autopilot • Actividades 2005-2006: • Projecto PESC • Aquisição de uma plataforma RC • Construção de duas plataformas (Brutus I e II) • Projecto de Sistemas de Automação (LEM) • Instrumentação da plataforma • Controlo e operação • Projecto, Seminário Trabalho de Fim de Curso (LEEC) • Planeamento e execução de missões • Equipa: • Ricardo Bencatel (LEM 5º) • Pedro Almeida (LEEC 5º) • Carlos Oliveira (DEEC) • Hélvio Viera (LEEC 5º) • Pedro Silva (LEEC 4º) • Sérgio Lopes (LEEC 4º) • Bruno Soares (LEEC 3º) • David Pereira (LEEC 3º) • José Henrique Araújo (LEEC 3º) • Hélio Teixeira (LGEI 3º) • João Poças (LEM 3º) • Marcos Silva (LEM 3º) • Nuno Costa (LEM 3º)