Download
1 / 10
100 likes | 190 Views
Validation of realistically simulated non-stationary data. Soma Mukherjee Centre for Gravitational Wave Astronomy University of Texas at Brownsville. GWDAW9, Annecy, France, 17/12/04 1. Why model the data ?.

E N D
Validation of realistically simulated non-stationary data. Soma Mukherjee Centre for Gravitational Wave Astronomy University of Texas at Brownsville. GWDAW9, Annecy, France, 17/12/04 1
Why model the data ? An effort to simulate segments of detector noise such that it has the same statistical characteristics as the data itself, e.g., it shows same kind of non-stationarity as present in the data. Non–stationarity can be of different types at different times. We can characterize it near any instant and construct a long stretch of simulated data. Different times will lead to different noise models. Astrophysical searches estimate efficiency and tune parameters of search algorithms from playground data. Data is non-stationary. E.g. a 60 s stretch of data may not have same value of variance as another 60 s at a later time. Thus any comparison or any estimation work carried out with discretely sampled real data will have bias introduced in it. What we obtain in that case is an ‘average’ value, not instantaneous value. Certain search algorithms require comparison of different data segments. These are different quantities when data is non-stationary. 2
Model outline Each data segment is divided into three independent components viz. lines, transients and noise floor. Each component is characterized by low order ARMA model in time domain. Modeled noise generated from the three independent components are added back together to construct the final product. 3
Data Algorithm : Demodulate Band pass FIR filter Whiten Lines Amplitude And phase Clean Line estimates Noise floor Second moment Estimation by Running median ARMA Model fit Data generation
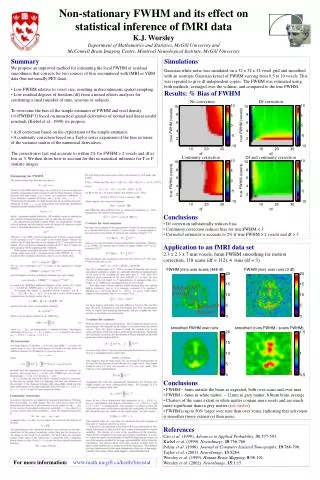
Validation : Using KSCD algorithm KSCD (Kolmogorov-Smirnov Change Point Detector) is a Nonparametric Burst Search algorithm. Both real data and modeled data is passed through the KSCD pipeline to make comparison. Rate (triggers per second) vs. Threshold is compared. 7
Future : Application in the triggered and untriggered burst searches. Library of models for an entire science run. Incoporate non-linearities: current modeling only valid for second moments