Download
1 / 1
30 likes | 225 Views
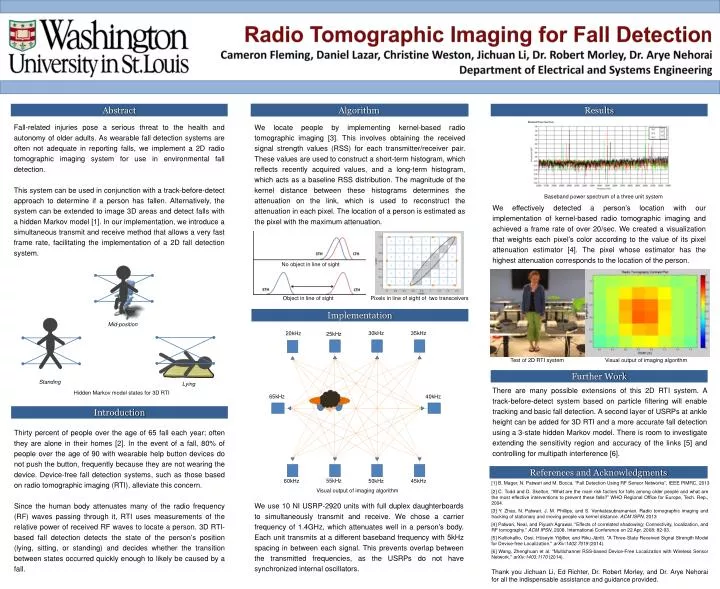
Radio Tomographic Imaging for Fall Detection Cameron Fleming, Daniel Lazar, Christine Weston, Jichuan Li, Dr. Robert Morley, Dr. Arye Nehorai Department of Electrical and Systems Engineering. Abstract. Algorithm. Algorithm. Results.

E N D
Radio Tomographic Imaging for Fall Detection • Cameron Fleming, Daniel Lazar, Christine Weston, Jichuan Li, Dr. Robert Morley, Dr. AryeNehorai • Department of Electrical and Systems Engineering Abstract Algorithm Algorithm Results Fall-related injuries pose a serious threat to the health and autonomy of older adults. As wearable fall detection systems are often not adequate in reporting falls, we implement a 2D radio tomographic imaging system for use in environmental fall detection. This system can be used in conjunction with a track-before-detect approach to determine if a person has fallen. Alternatively, the system can be extended to image 3D areas and detect falls with a hidden Markov model [1]. In our implementation, we introduce a simultaneous transmit and receive method that allows a very fast frame rate, facilitating the implementation of a 2D fall detection system. • We locate people by implementing kernel-based radio tomographic imaging [3]. This involves obtaining the received signal strength values (RSS) for each transmitter/receiver pair. These values are used to construct a short-term histogram, which reflects recently acquired values, and a long-term histogram, which acts as a baseline RSS distribution. The magnitude of the kernel distance between these histograms determines the attenuation on the link, which is used to reconstruct the attenuation in each pixel. The location of a person is estimated as the pixel with the maximum attenuation. Baseband power spectrum of a three unit system We effectively detected a person’s location with our implementation of kernel-based radio tomographic imaging and achieved a frame rate of over 20/sec. We created a visualization that weights each pixel’s color according to the value of its pixel attenuation estimator [4]. The pixel whose estimator has the highest attenuation corresponds to the location of the person. No object in line of sight Object in line of sight Pixels in line of sight of two transceivers Implementation Mid-position 35kHz 30kHz 20kHz 25kHz Test of 2D RTI system Visual output of imaging algorithm 65kHz 40kHz Further Work Standing Lying There are many possible extensions of this 2D RTI system. A track-before-detect system based on particle filtering will enable tracking and basic fall detection. A second layer of USRPs at ankle height can be added for 3D RTI and a more accurate fall detection using a 3-state hidden Markov model. There is room to investigate extending the sensitivity region and accuracy of the links [5] and controlling for multipath interference [6]. Hidden Markov model states for 3D RTI Introduction Thirty percent of people over the age of 65 fall each year; often they are alone in their homes [2]. In the event of a fall, 80% of people over the age of 90 with wearable help button devices do not push the button, frequently because they are not wearing the device. Device-free fall detection systems, such as those based on radio tomographic imaging (RTI), alleviate this concern. Since the human body attenuates many of the radio frequency (RF) waves passing through it, RTI uses measurements of the relative power of received RF waves to locate a person. 3D RTI-based fall detection detects the state of the person’s position (lying, sitting, or standing) and decides whether the transition between states occurred quickly enough to likely be caused by a fall. 55kHz 60kHz 50kHz 45kHz References and Acknowledgments [1] B. Mager, N. Patwari and M. Bocca, “Fall Detection Using RF Sensor Networks”, IEEE PIMRC, 2013 Visual output of imaging algorithm [2] C. Todd and D. Skelton, “What are the main risk factors for falls among older people and what are the most effective interventions to prevent these falls?” WHO Regional Office for Europe, Tech. Rep., 2004. [3] Y. Zhao, N. Patwari, J. M. Phillips, and S. Venkatasubramanian. Radio tomographic imaging and tracking of stationary and moving people via kernel distance. ACM ISPN, 2013 [4] Patwari, Neal, and PiyushAgrawal. "Effects of correlated shadowing: Connectivity, localization, and RF tomography." ACM IPSN, 2008. International Conference on 22 Apr. 2008: 82-93. [5] Kaltiokallio, Ossi, HüseyinYiğitler, and RikuJäntti. "A Three-State Received Signal Strength Model for Device-free Localization." arXiv:1402.7019(2014). [6] Wang, Zhenghuan et al. "Multichannel RSS-based Device-Free Localization with Wireless Sensor Network." arXiv:1403.1170(2014). Thank you Jichuan Li, Ed Richter, Dr. Robert Morley, and Dr. AryeNehorai for all the indispensable assistance and guidance provided. We use 10 NI USRP-2920 units with full duplex daughterboards to simultaneously transmit and receive. We chose a carrier frequency of 1.4GHz, which attenuates well in a person’s body. Each unit transmits at a different baseband frequency with 5kHz spacing in between each signal. This prevents overlap between the transmitted frequencies, as the USRPs do not have synchronized internal oscillators.