Download
1 / 7
80 likes | 103 Views
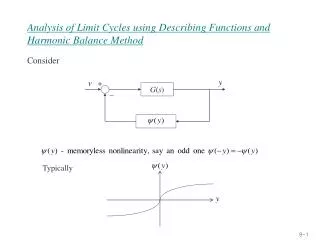
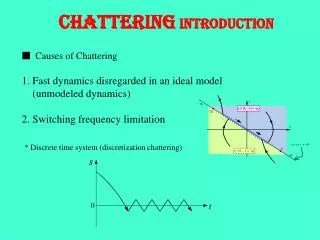
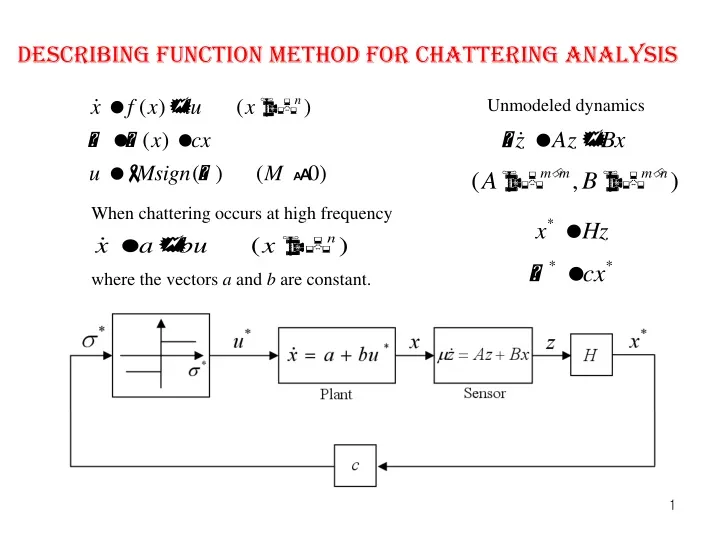
Describing Function Method for Chattering Analysis. Unmodeled dynamics. When chattering occurs at high frequency. where the vectors a and b are constant. Parameters of Oscillations. = Equivalent Control. * Frequency. ( k = 0, 1, 2, … ). Relay Gain Adaptation.

E N D
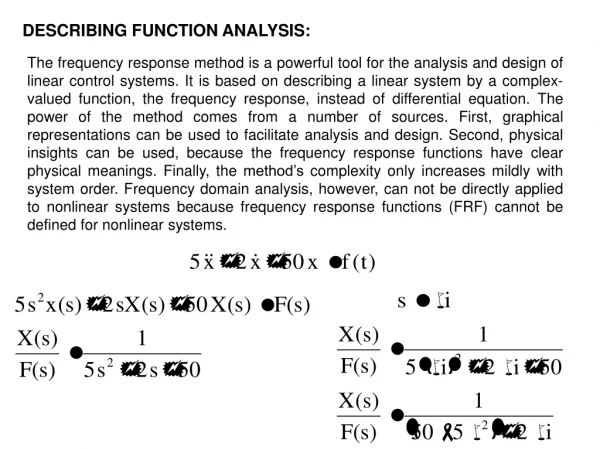
Describing Function Method for Chattering Analysis Unmodeled dynamics When chattering occurs at high frequency where the vectors a and b are constant.
Parameters of Oscillations = Equivalent Control * Frequency (k = 0, 1, 2, … )
Relay Gain Adaptation State-dependent Gain Method Relay gain depends on system states Unmodeled Dynamics
Relay Gain Adaptation State-dependent Gain Method Unmodeled Dynamics
R Relay Gain Adaptation Equivalent-control-dependent Gain Method Relay gain depends on the equivalent control
Relay Gain Adaptation Equivalent-control-dependent Gain Method (i) Gf >0 -1 < η< 1 (M0≥ |g|) → Sliding mode exists (ii) Gf <0
Relay Gain Adaptation Equivalent-control-dependent Gain Method