Download
1 / 16
160 likes | 280 Views
Systemy stacjonarne i niestacjonarne (Time-invariant and Time-varing systems). Mówimy, że system jest stacjonarny, jeżeli dowolne przesunięcie czasu dla sygnału wejścia u(t+) powoduje takie samo przesunięcie czasu dla sygnału wyjścia, to znaczy.

E N D
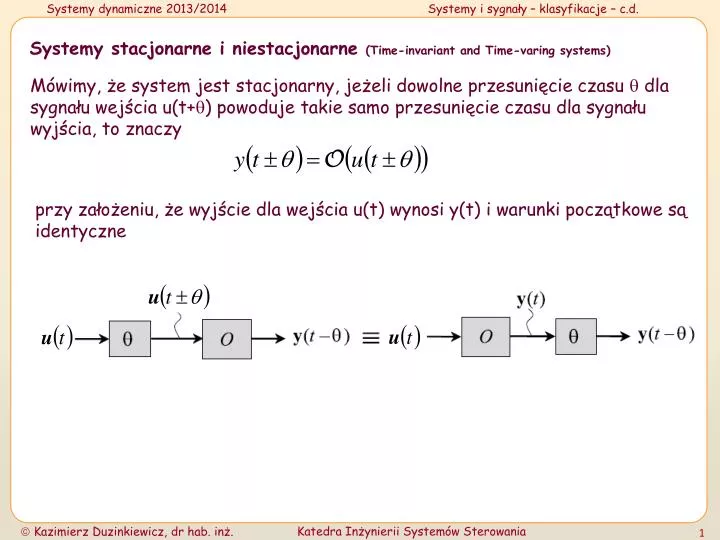
Systemy stacjonarne i niestacjonarne (Time-invariant and Time-varing systems) Mówimy, że system jest stacjonarny, jeżeli dowolne przesunięcie czasu dla sygnału wejścia u(t+) powoduje takie samo przesunięcie czasu dla sygnału wyjścia, to znaczy przy założeniu, że wyjście dla wejścia u(t) wynosi y(t) i warunki początkowe są identyczne
Praktyczne wskazówki: Na niestacjonarność wskazują jakiekolwiek niejednostkowe stałe związane z argumentem czasu np. u(2t), u(-t), u[2n], u[-n] jakiekolwiek współczynniki będące funkcjami czasu w równaniu różniczkowym lub różnicowym Przykłady: Systemy dyskretne: Systemy ciągłe: Stacjonarne Niestacjonarne
Graficzna ilustracja warunku stacjonarności System stacjonarny System niestacjonarny
Wyrazimy wprost warunek stacjonarności dla systemów ciągłych i dyskretnych Systemy dyskretne: Systemy ciągłe: Jeżeli dla wejścia systemu Jeżeli dla wejścia systemu wyjście systemu jest wyjście systemu jest to dla wejścia systemu to dla wejścia systemu wyjście systemu jest wyjście systemu jest to znaczy to znaczy
Przykład - system ciągły dynamiczny Mając system dynamiczny opisany równaniem różniczkowym określić, czy jest on stacjonarny dla zerowych warunków początkowych a) Niech: y(t) wyjście systemu dla wejścia u(t) Zastępując w równaniu systemu t przez tt1 dostaniemy Dla systemu stacjonarnego, dla wejścia wyjście jest Podstawiając do równania systemu
otrzymamy otrzymaliśmy poprzednio Zatem System jest niestacjonarny
b) Niech: y(t) wyjście systemu dla wejścia u(t) Zastępując w równaniu systemu t przez tt1 dostaniemy Dla systemu stacjonarnego, dla wejścia wyjście jest Podstawiając do równania systemu otrzymamy Zatem System jest stacjonarny
Przykład - system dyskretny dynamiczny Mając system dynamiczny opisany równaniem różnicowym określić, czy jest on stacjonarny Sprawdzić osąd dla wejść obliczając cztery pierwsze wartości wyjść Przyjąć warunek początkowy
a) Niech: y[n] wyjście systemu dla wejścia u[n] Zastępując w równaniu systemu n przez nn1 dostaniemy Dla systemu stacjonarnego, dla wejścia wyjście jest Podstawiając do równania systemu System jest niestacjonarny
Sprawdzimy nasz osąd na przykładzie Iteracyjnie policzymy cztery pierwsze wartości wyjść Dla sygnału u[n] Dla sygnału u[n-2] wyjście systemu wyjście systemu wynosi wynosi czyli czyli System jest niestacjonarny
b) Niech: y[n] wyjście systemu dla wejścia u[n] Zastępując w równaniu systemu n przez nn1 dostaniemy Dla systemu stacjonarnego, dla wejścia wyjście jest Podstawiając do równania systemu System jest stacjonarny
Sprawdzimy nasz osąd na przykładzie Iteracyjnie policzymy cztery pierwsze wartości wyjść Dla sygnału u[n] Dla sygnału u[n-2] wyjście systemu wyjście systemu wynosi wynosi czyli czyli System jest stacjonarny
Inne klasyfikacje systemów dynamicznych systemy przyczynowe i nieprzyczynowe systemy odwracalne i nieodwracalne Rożne kategorie systemów związane z liniowością i stacjonarnością Liniowe stacjonarne (Linear Time-invariant (LTI)) Systemy liniowe stacjonarne to systemy, które są liniowe i stacjonarne (wszystkie ich współczynniki są stałe w czasie); piszemy
Liniowe niestacjonarne (Linear Time-varying (LTV)) Systemy liniowe niestacjonarne to systemy, które są liniowe i w których co najmniej jeden współczynnik jest zmienny w czasie a zatem i operator O jest zmienny w czasie; piszemy Nieliniowe stacjonarne (Nonlinear Time-invariant (NTI)) Systemy nieliniowe stacjonarne to systemy, których operator jest stacjonarny, ale zależy od wejścia; piszemy
Nieliniowe niestacjonarne (Nonlinear Time-varying (NTV)) Systemy nieliniowe niestacjonarne to systemy nieliniowe, w których co najmniej jeden współczynnik jest zmienny w czasie, a zatem i operator O jest zmienny w czasie; piszemy
Dziękuję – koniec materiału prezentowanego podczas wykładu