Download
1 / 46
480 likes | 837 Views
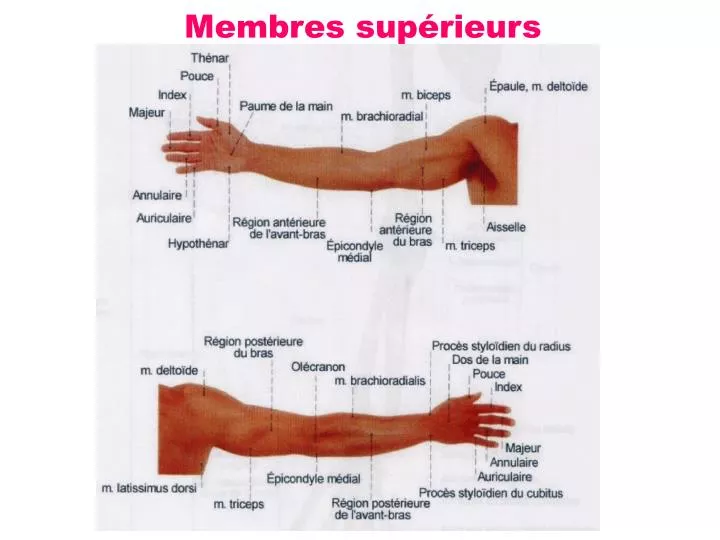
Membres supérieurs. Mouvement des membres supérieurs. L’une des tâches d’animation les plus courantes de l’animation du corps humain concerne le mouvement des membres supérieurs. Il est plus simple du point de vue du calcul de considérer le bras comme

E N D
Mouvement des membres supérieurs L’une des tâches d’animation les plus courantes de l’animation du corps humain concerne le mouvement des membres supérieurs. Il est plus simple du point de vue du calcul de considérer le bras comme un appendice qui se déplace indépendamment du reste du corps. Cela peut donner lieu à un mouvement d’une allure peu naturelle dans certains cas. À moins d’avis contraire, le bras sera considéré de manière isolée. Si nécessaire, on doit prévoir une étape de pré-traitement servant à positionner le personnage et le préparer à un mouvement de bras.
Modélisation du bras Le modèle de base du bras humain, si l’on fait abstraction des articula- tions de la main, peut être représenté sous la forme d’un manipulateur à 7 DDL. Une configuration ou pose d’un bras renferme 7 angles d’articulation. La rotation de l’avant-bras est associée au poignet alors que, dans la réalité, elle n’est pas associée à une articulation localisée mais répartie sur l’avant-bras lui-même.
Modélisation du bras Parfois, cette rotation est associée au coude, alors que d’autres réalisations créent une articulation virtuelle à mi-chemin de l’avant-bras.
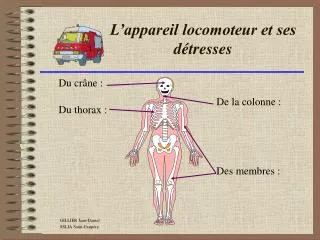
Limitation des mouvements Il est évident que les articulations du bras humain présentent des limites. Si l’on dépasse ces limites, cela entraîne un aspect non naturel. Les quelques limitations présentées ci-dessous sont tirées de « Krusen’s Handbook of Physical Medecine and Rehabilitation ». Ex. : Mouvement de l’épaule Flexion - extension de l’épaule Abduction - adduction de l’épaule
Limitation des mouvements Mouvement du coude : Flexion - extension du coude
Limitation des mouvements Mouvement du poignet : Flexion - extension du poignet
Limitation des mouvements Mouvement des articulations métacarpophalangiennes et interphalangiennes: Flexion - extension Flexion - extension
Limitation des mouvements Mouvement des articulations des doigts: Flexion - extension Flexion - extension
Limitation des mouvements Mouvement du pouce : Abduction - adduction
Limitation des mouvements Mouvement du pouce : Articulation métacarpophalangienne Articulation interphalangienne
Limitation des mouvements Les limites d’articulation peuvent aussi varier selon la position d’autres articulations; de nouvelles limites sont imposées aux articulations pour éviter l’intersection d’appendices avec d’autres parties du corps. La rotation de l’avant-bras autour de l’axe vertical est limitée par le tronc. Exemple :
Calcul des mouvements En appliquant ces limites d’articulation, certains mouvements généraux peuvent être obtenus via un modèle de cinématique direct tout en créant un mouvement relativement convaincant. En revanche, si le bras / main doit être actionné p/r à un objet fixe, un modèle de cinématique inverse est nécessaire. Exemple : Un bouton de porte. Malheureusement, cela ne garantit pas l’obtention d’un mouvement humain. Dans le modèle de base précédent, si uniquement la position souhaitée de l’effecteur final est donnée, alors plusieurs solutions existent. Cela risque de produire des configurations qui n’ont pas l’air naturelles. Il est préférable de spécifier la position finale du poignet et non des doigts pour mieux contrôler les configurations produites.
Calcul des mouvements Même si le poignet et l’épaule sont fixes, plusieurs positions pouvant être adoptées qui satisfont à la fois aux contraintes et aux limites d’articulations. Orienter les angles d’articulations vers des orientations préférées pour certaines tâches (approche de moindre effort) permet de réduire quelque peu le problème à solutions multiples. Afin de contrôler le mouvement avec plus de précision, l’animateur peut spécifier des positions et des orientations intermédiaires pour l’effecteur terminal ainsi que pour les articulations intermédiaires. Cela permet de définir des poses clés pour les liaisons. Une méthode de cinématique inverse peut ensuite être appliquée pour passer d’une pose à une autre de façon que le bras reste orienté sur le trajet donnant à l’animateur un meilleur contrôle du mouvement final.
Calcul des mouvements Au lieu d’utiliser l’approche de cinématique inverse à l’aide du Jacobien inverse, on opte pour la construction du bras dans un plan spécifié par l’utilisateur entre l’épaule, le coude et le poignet. Une fois le plan fixé, les angles de l’épaule et du coude peuvent être aisément calculés et ajustés en fonction de ce plan. un angle à 1 DDL
Articulation de l’épaule Cela est généralement modélisée sous la forme d’une articulation à rotule avec 3 DDL. C’est en réalité plus complexe. F. Scheepers(96) propose dans sa thèse "Anatomy-Based Surface Generation for Articulated Models of Human Figures" un modèle davantage réaliste de la clavicule et de l’omoplate ainsi que de l’articulation de l’épaule. L’auteur donne aussi une réponse au problème de la rotation de l’avant-bras au moyen d’une articulation au milieu de l’avant-bras.
Composition de la main Elle est composée de 27 os répartis en 3 groupes : - carpes ou os du poignet, - métacarpes ou os de la paume, - phalanges ou os des doigts. phalangines phalangettes
Tiré de Isabelle Létourneau, La main humaine Lieu de manifestation et condition d’actualisation. Éditions du Scribe, 2001. Importance de la main «Ce n’est pas, en effet, la main, absolument parlant qui est une partie de l’homme, mais seulement la main capable d’accomplir son travail, donc la main animée; inanimée, elle n’est pas une partie de l’homme.» Aristote. • Nous n’avons qu’à considérer les 3 principales tendances des gestes • de la main : • le geste comme manière d’être, • « la main est le sismographe des réactions affectives » de C. Wolff • - le geste comme manière de dire, • la main accompagne naturellement la parole • le geste comme manière de faire • « il ne lui suffit pas de prendre ce qui est, il faut qu’elle travaille à ce qui • n’est pas et qu’elle ajoute aux règnes de la nature un règne nouveau » • H. Focillon
La main humaine, organe d’une extraordinaire complexité, est un instrument primordial pour l’action quotidienne. Importance de la main Défi : la simulation dynamique et complète de la main et de l’avant-bras humains. Applications : étude d’ergonomie, rééducation, compréhension des maladies professionnelles, télé manipulation, jeux vidéo, cinéma. Cette main robotique conçue au Département de génie mécanique de l’UL pourrait servir de "main" au bras canadien. Concevoir et fabriquer un préhenseur calqué sur la main humaine coûte très cher et inutilement complexe pour la plupart des actions demandées à un robot. Clément Gosselin, directeur du Laboratoire de robotique.
Modèle de la main humaine Modèle conçu par Catmull(72) à l’aide de polygones
Modèle de la main humaine Modèle simple d’une main et de ses doigts : Ce modèle a été utilisé dans les travaux de Rijpkema et Girard, SIGGRAPH’91.
Modèle de la main humaine • des modèles avec des articulations plus précises dans la zone de la paume pour obtenir un mouvement d’allure humaine. Ce modèle est proposé par Nadia M. Thalmann & Daniel Thalmann. Synthetic Actors in Computer-Generated 3D Films. Springer-Verlag, 1990.
Modèle de la main humaine Modèle plus simple combinant les 4 doigts en une même surface : Cela réduit à la fois la complexité de l’affichage et du contrôle du mouvement.
Modèle de la main humaine Modèle intermédiaire : On peut conserver la même qualité de l’image si l’on utilise un modèle très détaillé en se contentant toutefois de coordonner le mouvement de l’ensemble des articulations des 4 doigts avec un seul paramètre.
Modèle de la main humaine Modèle multicouches : I. Albrecht, Construction and Animation of Anatomically Based Human Hand Models. Eurographics / SIGGRAPH Symposium on Computer Animation (2003). la surface de la peau (un maillage 3D de 3000 triangles), 1. obtenue à l’aide d’un plâtre le squelette de la main constitué de 29 maillages triangulaires, 2. Tiré du domaine public : http://www.3dcafe.com/asp/anatomy.asp Une mise à l’échelle est effectuée pour tenir compte de la surface de la peau. un ensemble de pseudo muscles permettant de décrire le mouvement des os de la main à l’aide de données anatomiques et de lois mécaniques. 3. un ensemble de muscles "géométriques" simulant la déformation de la peau de la main. 4.
Modèle multicouches (suite) : Une structure hiérarchique représentant le squelette de la main avec un repère associé à chaque articulation. 5. Note : Ces 2 types de muscles sont animés à partir d’un paramètre de contraction (paramètre entre 0 et 1). À chaque image, la déformation de la peau et la position des os sont déterminées à partir de ces paramètres de contraction.
Limitation des angles d’articulation Tiré de J. Lee & T. L. Kunii, Model-Based Analysis of Hand Posture. IEEE CG & A, September 95, pp. 77-86. Les mouvements des doigts de la main sont régis par des contraintes biomécaniques qui font que certaines postures ne sont pas réalisables. Cela réduit dès lors le # de DDLs. Contraintes statiques : Cela traduit les limites des angles d’abduction / adduction ou de flexion / extension possibles des différentes articulations. Exemple : L’angle de flexion / extension des premières phalanges des 4 doigts est compris entre –110° et 15°. Contraintes dynamiques : Les articulations d’un doigt varient dans un plan (sauf l’articulation métacarpophalangienne). 1. C’est presque impossible de modifier l’angle d’articulation au bout d’un doigt sans altérer l’angle voisin du même doigt. 2. une relation presque linéaire : = (2/3)
Limitation des angles d’articulation Lors d’un mouvement d’abduction / adduction, le majeur ne bouge pas de façon appréciable à moins de l’y forcer. 3. interdépendance entre la flexion /extension et l’abduction /adduction de chaque phalange 4. Plus l’angle de flexion / extension est grand, plus l’abduction / l’adduction des doigts est limitée. Considérons l’articulation métacarpophalangienne a : angle d’abduction / adduction, et f : angle d’extension / flexion, amin, amax, fmin, fmax : contraintes statiques sur a et f, alors 1 - 1 f x amax fmax est le maximum qui peut être atteint pour a.
Limitation des angles d’articulation L’angle d’extension/flexion de l’articulation métacarpophalangienne varie dans un intervalle ayant comme largeur 90°, légèrement moins pour l’index, et allant en croissant en s’éloignant de l’index. 5. Note : la flexion d’un doigt isolé peut entraîner la flexion d’un voisin, la flexion d’un doigt isolé est limitée par l’état d’extension des doigts adjacents, l’extension d’un doigt est entravée par la flexion des autres, Posons 2, 3, 4 et 5 l’angle d’extension / flexion de l’index, du majeur, de l’annulaire et de l’auriculaire resp. contraintes statiques
Pourquoi la simuler ? Préhension humaine Chirurgie médicale et conception de prothèses artificielles pour corriger les déficiences humaines dues à des accidents ou des malformations, acteurs virtuels interagissant avec l’environnement. Approches de la simulation empirique : La connaissance est acquise en observant comment les humains saisissent les objets. Difficulté : Déduire à partir d’observations du comportement humain des principes devant être appliqués à des modèles d’approximation. analytique : On se base sur les lois de la physique pour simuler ce processus. Difficulté : On doit simplifier les modèles; c’est donc valide pour un ensemble très réduit d’expériences.
But final en animation : Préhension humaine L’apparence réaliste des images et pas nécessairement un modèle absolument exact du monde physique. Exemple de préhension humaine Aspects à considérer : Choisir le type de prises et le mode d’utilisation de ces prises. Déterminer les angles d’articulations afin de saisir avec précision un objet. Une fois l’objet saisi, l’objet et la main ne font plus qu’un. En saisissant un livre, les mouvements du bras et du livre sont combinés. Exemple :
Rendez-vous à Montréal. Préhension humaine Marilyn saisit un verre et le porte à sa bouche.
Caractéristiques à considérer dans un système de préhension : Préhension humaine Notes de cours, Daniel Thalmann Utilisation de pincement quand l’objet est trop petit. Utilisation de 2 mains quand l’objet est trop grand ou trop gros. Imposer des contraintes sur plusieurs articulations pour assurer une fermeture réaliste de la main. Définir une méthode heuristique pour choisir une des stratégies de préhension selon la géométrie des objets, celle des mains et l’observation de la préhension réelle. La cinématique inverse peut déterminer les postures finales des bras de façon à amener les mains autour des objets. La forme des objets décide des points de contact des doigts sur les objets, leur position et leur orientation.
Stades à l’intérieur d’une prise Préhension humaine Une prise, quel que soit son type, se compose de quatre stades : Ouverture de la main. Fermeture des doigts pour saisir l’objet et s’adapter à sa forme. Réglage de la force exercée pour tenir l’objet. Cette force exercée par un individu dépend du poids, des caractéris- tiques de la surface, de la fragilité et de l’utilisation de l’objet. Relâchement de la prise, au cours duquel la main s’ouvre pour laisser l’objet.
Rôle du pouce lors de la préhension Préhension humaine Le pouce confère aux humains une grande dextérité manuelle. capacité de montrer du doigt, saisir des objets de différentes formes, exercer des forces telles que celles nécessaires pour dévisser le couvercle d’un bocal par exemple, etc. Le pouce, bien qu’il ne soit pas toujours utilisé dans les prises, donne à la main à la fois de la stabilité et une aide pour contrôler la direction dans laquelle l’objet se déplacera.
Types de prises et modes d’utilisation de ces prises Préhension humaine Les études sur la préhension considèrent au moins 16 catégories différentes de préhension. Le choix du meilleur mode de préhension (le plus efficace et/ou le plus crédible) ajoute énormément de complexité à la simple capacité de réalisation de la prise. On peut considérer différents critères pour choisir un mode de préhension : • si l’objet est trop petit pour être saisi avec plus de 2 doigts • (pincement), • si l’objet est trop grand ou trop lourd pour le saisir avec une main, • une préhension à 2 mains est appliquée, utilisant les 2 mains sur • les côtés opposés de l’objet, • pour une forme d’objet irrégulière, la décision est prise en fonction • de volumes enveloppants.
Les doigts maintiennent l’objet contre la paume; la main est alignée sur l’avant-bras; cette prise nécessite un contrôle ferme. Prises de force Préhension humaine
Prises de précision Préhension humaine limitées surtout aux articulations métacarpophalangiennes; un contact pulpe contre pulpe entre le pouce et les doigts; le pouce s’oppose aux autres doigts.
D’autres types de prises : Préhension humaine Prises à 2 mains Prises à plusieurs Environnements Virtuels Multimédias, Daniel Thalmann.
Coordination du mouvement L’interaction entre parties du corps est un problème qui dépasse la détermination des articulations à utiliser dans un mouvement donné. Si le fait de considérer le bras et la main comme des systèmes indépendants et distincts simplifie la stratégie de contrôle, leur relation avec le reste du corps doit être pris en compte pour un traitement plus robuste de la préhension. • repositionner, tordre ou plier le torse, • effectuer des mouvements de réaction avec l’autre bras, • contrebalancer avec les jambes. Au lieu de conserver le reste de son corps en une position fixe et de tendre les articulations jusqu’à leur limite et produire un stress, il est préférable que d’autres parties du corps coopèrent pour soulager la tension musculaire et conserver l’équilibre. Exemple : La marche implique non seulement les jambes mais le torse, les bras et même la tête.
Coordination du mouvement Expérience : - tendre son bras vers le côté, - tourner la paume de sa main face à vous, • tourner ensuite la main face vers le bas et essayer de continuer à la • faire tourner jusqu’à ce qu’elle revienne de nouveau face à vous. Réalisez l’expérience en n’impliquant que la main/poignet/avant-bras. Répétez l’expérience en ajoutant le bras et l’épaule. Répétez l’expérience en ajoutant un mouvement du torse, de la clavicule et du dos. Modélisez ce mouvement de façon réaliste est très difficile.
Préhension avec contournement d’obstacles La spécification et le contrôle du mouvement de préhension sont compliqués en plaçant dans l’environnement des obstacles qu’il faut éviter. Il ne suffit pas de planifier un trajet sans collision pour l’effecteur terminal. DE PLUS, Le membre entier balaie pendant l’opération de préhension un volume d’espace qui doit être totalement libre de tout objet afin d’éviter toute collision. Les stratégies pour déterminer le trajet sont souvent complexes et les résultats ont dans bien des cas une allure non humaine. Le coût d’une collision peut avoir une incidence sur le trajet résultant : le coût d’une collision avec une clôture en fil de fer barbelé est plus élevé qu’avec une serviette de toilette.
Relation entre les gestes de la main et la parole Interprétation des gestes de la main
Références Gilles Cours, Apprendre à dessiner les mains. Éditions FLEURUS, sept. 2002, 32p. David J. Magee, L’évaluation clinique en orthopédie. Edisem Inc., 1988, chap. 6, pp. 109-144. Rick Parent, ANIMATIQUE Algorithmes et techniques. Vuibert, 2003, chap. 6, section 6.1, pp. 323-332. Hans Rijpkema and Michael Girard, Computer Animation of Knowledge-Based Human Grasping. Computer Graphics, Vol. 25, No. 4, July 1991. Ying Wu and Thomas S. Huang, Hand Modeling, Analysis, and Recognition. IEEE Signal Processing Magazine, Mai 2001, pp. 51-60.