Download
1 / 23
280 likes | 767 Views
UNDERWATER GLIDERS. CONTENTS. Introduction Topics dealt with… Underwater gliders Working of an underwater glider Applications Objective of the experiment Glider operations Future developments and applications at the Institute Of Ocean Technology ASMT Laboratory scale glider Conclusion

E N D
CONTENTS • Introduction • Topics dealt with… • Underwater gliders • Working of an underwater glider • Applications • Objective of the experiment • Glider operations • Future developments and applications at the Institute Of Ocean Technology • ASMT • Laboratory scale glider • Conclusion • Thank you…
INTRODUCTION • Sampling of oceans has traditionally been conducted from ships. • HMS challenger(1872-1876). • Took an awesome period of 23yrs.to compile the results. • Emergence of alternative technologies • Has brought us a long way from the “CHALLENGER CRUISE”.
TOPICS DEALT WITH… • AUVs ( Autonomous underwater vehicles) • AOSN-2 field expt in Monterey bay, California. • Current efforts to develop a laboratory scale glider.
Underwater gliders • Represent a rapidly maturing technology • Large cost saving potential
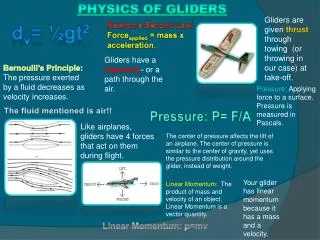
Working of an Underwater Glider • Buoyancy engine to change their weight in water. • Generation of hydrodynamic lift and drag forces • Closed loop control of attitude and depth- performed by an on-board computer that executes a pre-programmed mission while submerged
A receiver to compare the position with the desired position from the mission plan • Position error used to compute the average current flow encountered…… which is used to correct the dive parameters for the next dive cycle. • Communication at the surface using an IRIDIUM satellite connection.
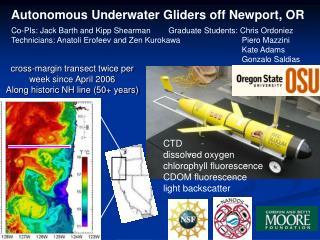
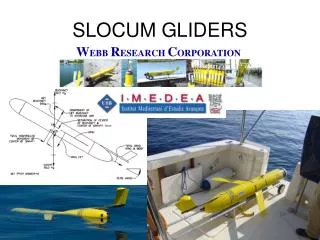
Antennae’s are integrated into the gliders • For a SLOCUM glider antennae and receiver are embedded within the rudder assembly. • Glider collects data from their scientific sensors • Besides CTD sensors, they even carry PAR sensors and Fluorometers
APPLICATIONS • Autonomous Ocean Sampling Network 2-Monterey Bay 2003 • Conducted during the summer of 2003 in Monterey Bay, California • Bay was chosen for its accessibility, resident research institutions with on site hardware (ships, airplanes, AUVs) and its interesting bathymetry.
A certain drawback due to additional sensors as well as frequent communication and shallow dives is: • Increase in power consumption thereby a reduction in mission length.
OBJECTIVE OF THE EXPERIMENT • To demonstrate the feasibility of an integrated ocean observation ,modeling and prediction system. • This expt differs from the previous efforts because of its high degree of system integration
GLIDER OPERATIONS • Two types of gliders were available: SPRAY gliders & SLOCUM gliders • Prior to the expt all gliders were shipped to the MBARI in Moss landing, California. • Sensor data were closely monitored during the course of the experiment. • Undue advantage of the different depth capabilities of gliders were taken
.communication to and from the gliders using IRIDIUM satellite. • Due to more frequent inflections and higher sensor load SLOCUM gliders were recovered during the course of the experiment. • After recovery ,gliders battery packs were replaced system re-ballasted, checked out and readied for deployment. • A real time operational display was made available at the control center at MBARI.
The display was improved during the course of the expt. (display was automated) • FINDINGS • Gliders sometimes advanced marginally over the course of some several hours • Far above its theoretical limits • This phenomenon was observed 3-4 times
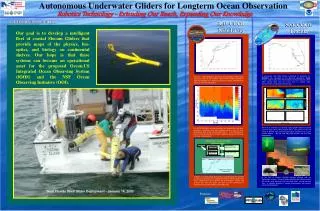
UNDERWATER GLIDERS • The performance of several multi-vehicle expts shows the potential for added value by using coordinated control strategies • New tools are under development that allow for improved planning and monitoring of the observational assets which will provide a higher degree of autonomy during future deployments.
FUTURE DEVELOPMENTS AND APPLICATIONS AT THEINSTITUTEOF OCEAN TECHNOLOGY • Newfoundland Ocean Observation, modeling and prediction facility (NOOMPF) • A Team of researchers from NRC-IOT, Memorial University of Newfoundland (MUN) and the department of fisheries and oceans (DFO) • Currently developing a plan to implement a regional coupled ocean observation and modeling system in Newfoundland (NOOMPF) • Possible sites –Conception Bay, Trinity Bay and Placentia Bay.
Goal is to develop a capability for automated coupled oceanobservation and model predictions on a regional scale.
Enhance our ability to predict and manage the ocean • Observations will be based on a suite of different sampling platforms • Conventional observations + data available from satellites + autonomous mobile platforms. • NRC-IOT ’s role is to develop the control and communication infrastructure necessary to direct and monitor the observational assets.
ASMT • WILL SERVE AS THE MAIN CONTROLAND MONITORIG SURFACE.
LABORATORY SCALE GLIDER • NRC-IOT is considering developing a lab. Scale glider • Purpose of a lab. Scale glider is to conduct expts. for hydrodynamic testing and control and to provide a test –bed for new actuation and flow sensing technologies • Design alternatives and constraints of a buoyancy engine • Vertical motion tests • After completion of design of buoyancy engine –hydrodynamic design of the glider
CONCLUSION • Autonomous underwater vehicles, and in particular autonomous underwater gliders represent a maturing technology with a large cost saving potential over current ocean sampling technologies for sustained (month at a time) real time measurements.