Download
1 / 10
100 likes | 231 Views
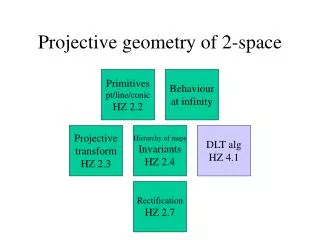
Projective geometry of 2-space. Primitives pt/line/conic HZ 2.2. Behaviour at infinity. Projective transform HZ 2.3. Hierarchy of maps Invariants HZ 2.4. DLT alg HZ 4.1. Rectification HZ 2.7. Computing a homography.

E N D
Projective geometry of 2-space Primitives pt/line/conic HZ 2.2 Behaviour at infinity Projective transform HZ 2.3 Hierarchy of maps Invariants HZ 2.4 DLT alg HZ 4.1 Rectification HZ 2.7
Computing a homography • given 2 images of a scene, we would like to compute the homography H that relates their pixels • excellent example of the system-of-equations approach to compute a matrix (the homography) as a null vector • H is a 3x3 matrix with 8 dof (9 – 1) • Hx = x’ • how will we solve for these 8 degrees of freedom? • solve for H using 4 point correspondences(x1,x1’), ..., (x4,x4’) • bootstrap from 4 matches to all matches • how will we find 4 point correspondences? SIFT (later) • can also rectify using these ideas (Fig 2.4) • HZ87-88, HZ35, Figure 4.9a,b
Lessons of DLT • using SIFT for feature detection and feature matching • developing the linear system of equations appproach • learning to precondition data • learning how to solve least squares • we have learned how to solve for null space • learning RANSAC
Cross product as matrix multiplication • we know that cross product may be interpreted as a determinant • it is even more useful to interpret it as a skew-symmetric matrix • a x b = [0 -a2 a1] [b0] [a2 0 -a0] [b1] [-a1 a0 0] [b2] • this is now a matrix multiplication and fits seamlessly into our algebraic schemes • we abbreviate this matrix [ax] so that a x b = [ax] b • cute: a is the null vector of [ax] (there’s no avoiding null space!) • mnemonic: lower triangle is a2,-a1,a0 • later we will interpret cross product as a tensor! • HZ581, Appendix A
Reducing H to a null space • idea: use Hxi = xi’ to solve for H • Hxi = xi’ (which is not true in projective space; think scale) becomes xi’ x Hxi = 0 • let xi’ = (xi’, yi’, wi’), and use the skew-symmetric representation: • xi’ x Hxi = [0 - wi’ yi’] [h1txi] [wi’ 0 -xi’] [h2txi] [-yi’ xi’ 0] [h3txi] OR • [0 -wi’ yi’] [xit h1] [wi’ 0 -xi’] [xit h2] = 0 [-yi’ xi’ 0] [xit h3] OR • [0 -wi’xit yi’xit] [h1] [wi’xit 0 -xi’xit] [h2] = 0 [h3] OR (having removed the 3rd equation, since it is linearly dependent on the others) • Aih = 0 • where Ai is a 2x9 matrix and h is the row-major unrolling of H • this interprets H as the null vector of a 2x9 matrix
Preamble to DLT algorithm • Note: xi’ * row1 + yi’ * row2 = -wi’ * row3 • DLT (Direct Linear Transformation) algorithm uses this transformation of point correspondences into a solution for the homography H • Aih = 0 encodes the restriction xi’ x Hxi = 0 (xi’ and Hxi are equivalent) • but now in the form of a linear system (no cross product, H isolated) • set the projective coordinate w = 1 in all of the points • collect 4 of these pt-correspondence matrices Ai, yielding an 8x9 matrix A, with a one-dimensional null space • solve Ah = 0 for null vector h using SVD (see above) • notice how this reverses the point of view: change the typical “solve Hxi = xi’ for xi“ into “solve Hxi = xi’ for H” • translate the matrix into a vector by unrolling • HZ88-89
DLT algorithm • Find 4 point correspondences between 2 images of the same scene. • Precondition (see below). • Build the matrix Ai from each correspondence (xi , xi’). • Combine A1,...,A4 into A. • Find A’s null vector [see above: last column of V in SVD of A]. • This is the homography matrix H (encoded in row-major unrolling) that maps between the two images.
Preconditioning • essential to normalize the images before applying DLT algorithm • let {(xi , xi’): i = 1,...,n} be the point correspondences • translate and scale both pointsets • translate centroid of {xi} to origin • scale new {xi} so that average {dist(xi , origin)} = sqrt(2) • motivation: typical point looks like (1,1) • do likewise to {xi’}, but entirely independently • translate centroid to origin and scale so avg dist from origin is \sqrt(2) • this normalization ensures that changes in x, y and w have comparable effect • e.g., if (100,100,1) is a feature point, changes in w will have 100 times more effect than changes in x or y • HZ107-109
DLT with more than 4 correspondences • we can solve for the homography using only 4 point correspondences, but SIFT will typically find many more • if n>4 point correspondences are known, we can collect them into a 2n-by-9 matrix A • unless these correspondences are calculated exactly (highly unlikely!), Ah=0 will not be solvable • instead, minimize ||Ah|| subject to the constraint ||h||=1 • the constraint is added to avoid the zero solution • this optimal solution is the last column of V in the singular value decomposition A = UDV^t • serendipitously, same technique as original DLT algorithm • the vector h is reconstructed into H (see above) • that is, DLT algorithm remains exactly the same with 4 replaced by n • HZ90-91, 593
Outliers and noise • it is better to use all of the computed correspondences, because some of them will be unreliable • cannot guess which 4 are reliable • can use RANSAC to determine the highly unreliable correspondences (the outliers) • then use all of the remaining (still noisy) correspondences • when data is noisy, better to use lots of data • Who wants to be a millionaire? studio audience poll