Download

1 / 28
460 likes | 1.1k Views
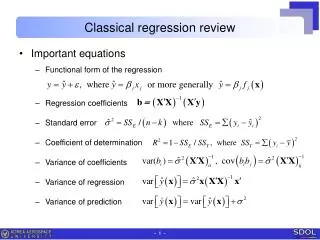
Review of Classical Physics. By the late part of the 19th century, physics consisted of two great pillars: a) mechanics including thermodynamics and b) electromagnetism. However, a series of problems that should have been solvable continued to perplex physicists.

E N D
By the late part of the 19th century, physics consisted of two great pillars: a) mechanics including thermodynamics and b) electromagnetism. However, a series of problems that should have been solvable continued to perplex physicists.
Modern physics is the study of the two great revolutions (relativity and quantum mechanics) that solved these problems and our continuing effort to find the ultimate rules of the game.
Physics Problem No No Large Object Quantum Mechanics Fast Object Yes Yes Classical Physics Yes Large Object Or Relativity Quantum Mechanics No Or Relativity Relativity & QM
Classical Physics • General Ideas of Mechanics 1. A reference frame is a coordinate axis and origin used by an observer to describe the motion of an object. 2. An inertial reference frame is one in which the observer is not accelerating (i.e. one in which Newton's Laws are valid without adding fake forces to your free-body diagram) Question:Accelerating with respect to what?
Galilean Relativity All inertial reference frames are equivalent! Another way of stating this principle is that only relative motion can be detected. Transformation Equations If you know what an observer in a particular reference frame observes then you can predict the observations made by an observer in any other reference frame. The equations that enable you to make these calculations are called Transformation Equations.
Invariance Since the labeling of your coordinate axis and its origin location is arbitrary, the equations of physics should have the same form regardless when you rotate or translate your axis set. Equations that have this property are said to be invariant to the transformation. It wasshown that Maxwell's Equations are not invariant under a Galilean Transformation so E&M and Mechanics are not consistent.
General Ideas of E&M 1. Light is a transverse wave. 2. The speed of light depends only on the medium through which it travels and not upon the observer. 3. The light propagates from the sun to the earth through the luminiferous ether. 4. Properties of the Ether Fluid i) non-viscous - Earth doesn't slow down while traveling through the ether. ii) incompressible - speed of light is very fast iii) massless
Galilean Transformations A. Time All observers measure the same time. This was assumed without proof and used to derive our equations t = t'
B. Position Let us consider a ball being measured by two different observers as shown below: y' y Ball Sue x' x Tom
B. Position By vector subtraction, we see that the location of the ball according to Sue is given by: y' y Ball Sue x' x Tom where is the position of the ball as seen by Sue is the position of the ball as seen by Tom is the position of Sue as seen by Tom
C. Velocity We now apply the time derivative operator to both sides of our position. Applying the definition of velocity, we can rewrite the right-hand side of the equation as where is the velocity of the ball as seen by Tom is the velocity of Sue as seen by Tom
C. Velocity Since the time measured by both Sue and Tom is the same, we can replace t with t' and apply the definition of velocity to the left-hand side of the equation. where is the velocity of the ball as seen by Sue. You should note that the definition of velocity requires that both the time and position be measured by the same observer!
D. Acceleration We now follow the same procedure as in part C to obtain the relationship between the ball's acceleration as measured by Sue and as measured by Tom. Where is the acceleration of the ball as seen by Tom is the acceleration of the ball as seen by Sue is the acceleration of Sue as seen by Tom
D. Acceleration Where is the acceleration of the ball as seen by Tom is the acceleration of the ball as seen by Sue is the acceleration of Sue as seen by Tom Note: If Sue and Tom are not accelerating with respect to each other (ie ), they will agree on the acceleration of the ball and Newton's Laws! The last term on the right-hand side is the reason we add fake forces when using non-inertial reference frames.
Problem: Assuming that , who is accelerating (Tom, Sue, or both)? E. Special Case of Two Observers in 1-D Uniform Motion In developing special relativity, we find it convenient to simplify the math by considering the motion of an object as see by two observers who are in 1-D uniform motion with respect to each other. Thus, we will assume the following: 1) Tom and Sue are both located at the origin att = 0(We can arbitrarily start measuring time whenever we want so this doesn't limit our results) 2) Sue is traveling at constant speeduin the+xdirection as seen by Tom (Thus, we don't consider acceleration. This is what will be special about special relativity!)
The position vector of Sue as seen by Tom is given at any instant t by Inserting our results above into our previous results for the position equation of the Galilean Transformation, we have We will see how these equations must be modified for high speed problems when we study the Lorentz Transformation.
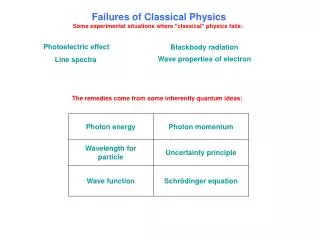
IV. Important Physics Problems of Late 19th Century Modern Physics was developed as the solution to some extremely important problems in the late 19th century that stumped physicists. We will study these important problems and how they have caused us to change our notions of time, space, and matter. Some of these important problems include a) the ether problem, b) stability of the atom, c) blackbody radiation, d) photoelectric effect, and e) atomic spectra.
V. Binomial Approximation The Binomial Expansion is a powerful method for approximating small effects in physics and engineering problems. It is extremely useful in both special relativity and electromagnetism problems even when you have a calculator. The expansion of the nth power of (1+x) is given by The Binomial approximation states that when x << 1
VI. Work and Energy Concepts A. Work The work done by a force, , upon a body in displacing the body an amount is defined by the equation B. Energy Energy is the ability of a body to perform work. (i.e. Stored Work!!) C. Kinetic EnergyKinetic energy is defined as the energy that an object has due to its motion!
D. Work-Energy Theorem The work done by the net external force upon an object (or equivalently the net work done by all forces upon the object) is equal to the change in the objects kinetic energy!! The work-energy theorem is the heart of all energy concepts as it relates the connection between Newton II, work and energy!! We used this theorem to derive the conservation of mechanical energy and to develop the classical formula for computing the kinetic energy of a body.
E. Classical Formula For Finding The Kinetic Energy of an Object The kinetic energy of an object traveling at speeds much less than the speed of light (ie classical physics) can be obtained using the formula Proof: Inserting Newton II into the work energy theorem, we have that
We now apply the definition of velocity and linear momentum to our equation In classical mechanics, the mass of a particle is constant (an assumption we will have to re-examine in special relativity) so We can simplify our equation by using the following Calculus
Thus, our equation is simplified to By comparing the individual terms, we obtain our classical formula for kinetic energy.
F. Temperature and Average Energy In our study of thermodynamics, the relationship is developed between average energy of a monatomic gas molecule with three degrees of motion and the temperature of the gas. The constant of proportionality is called the Boltzman constant and is related to the ideal gas constantR The calculation of the average energy of the particle involves two separate steps: • determining the number of degrees of freedom for the particle and • determining the average energy for each degree of freedom.
We can rewrite our previous result for a gas particle with three degrees of freedom as Thus, we see that each degree of freedom (translation in the x, y, and z directions) have on average of energy. This fact can be generalized as the equipartition theorem.
Equipartion Theorem The average energy of any degree of freedom involving square of a generalized co-ordinate is . The equipartition theorem is very useful in classical calculations of systems containing many particles like gases. We will use this concept when considering the classical computation of the thermal radiation of black-bodies. The ability to correctly calculate the number of degrees of freedom for more complicated systems is considered in Mechanics. The application of this material in determining macroscopic properties of systems based upon their atomic nature is considered in Advanced Thermodynamics, Statistical Mechanics, and in Solid State Physics.
Classical Physics Review - Objectives 1. Know the meanings of basic mechanics terms including "event," "observer," and "reference frame" 2. Know the Galillean Transformation equations and the principle assumption behind their development 3. Review Newton's Laws including inertial frames of reference. 4. Review the basic concepts of particles concerning linear momentum, energy, location, and trajectory 5. Review Maxwell's Equations and know the basic properties of light (speed, transverse wave, etc). 6. Review the basic concepts of energy and linear momentum and be able to apply these concepts 7. Review the basic properties of waves including energy, and interference. 8. Understand the conflict between mechanics and electromagnetic theory concerning light. 9. Review the kinetic theory of gases and its application to determining specific heat 10. Know the Binomial Expansion and be able to apply it to problems