Download
1 / 35
350 likes | 481 Views
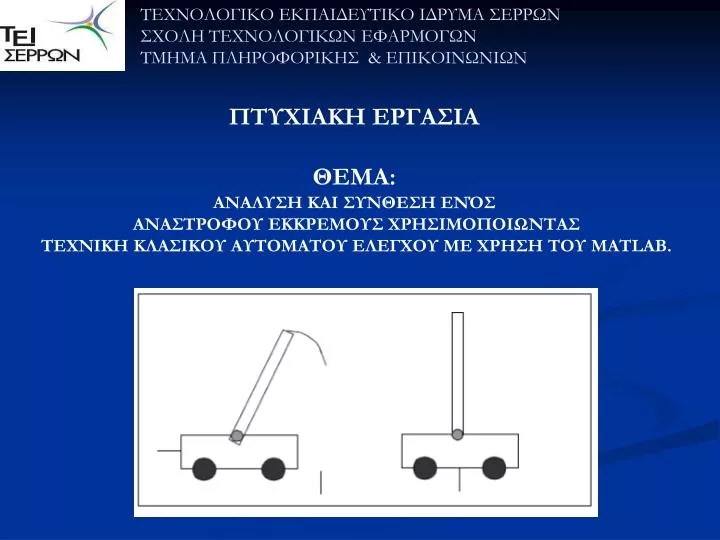
ΤΕΧΝΟΛΟΓΙΚΟ ΕΚΠΑΙΔΕΥΤΙΚΟ ΙΔΡΥΜΑ ΣΕΡΡΩΝ ΣΧΟΛΗ ΤΕΧΝΟΛΟΓΙΚΩΝ ΕΦΑΡΜΟΓΩΝ ΤΜΗΜΑ ΠΛΗΡΟΦΟΡΙΚΗΣ & ΕΠΙΚΟΙΝΩΝΙΩΝ. ΠΤΥΧΙΑΚΗ ΕΡΓΑΣΙΑ ΘΕΜΑ: ΑΝΑΛΥΣΗ ΚΑΙ ΣΥΝΘΕΣΗ ΕΝΌΣ ΑΝΑΣΤΡΟΦΟΥ ΕΚΚΡΕΜΟΥΣ ΧΡΗΣΙΜΟΠΟΙΩΝΤΑΣ ΤΕΧΝΙΚΗ ΚΛΑΣΙΚΟΥ ΑΥΤΟΜΑΤΟΥ ΕΛΕΓΧΟΥ ΜΕ ΧΡΗΣΗ ΤΟΥ MATLAB.

E N D
ΤΕΧΝΟΛΟΓΙΚΟ ΕΚΠΑΙΔΕΥΤΙΚΟ ΙΔΡΥΜΑ ΣΕΡΡΩΝ ΣΧΟΛΗ ΤΕΧΝΟΛΟΓΙΚΩΝ ΕΦΑΡΜΟΓΩΝΤΜΗΜΑ ΠΛΗΡΟΦΟΡΙΚΗΣ & ΕΠΙΚΟΙΝΩΝΙΩΝ ΠΤΥΧΙΑΚΗ ΕΡΓΑΣΙΑ ΘΕΜΑ: ΑΝΑΛΥΣΗ ΚΑΙ ΣΥΝΘΕΣΗ ΕΝΌΣ ΑΝΑΣΤΡΟΦΟΥ ΕΚΚΡΕΜΟΥΣ ΧΡΗΣΙΜΟΠΟΙΩΝΤΑΣ ΤΕΧΝΙΚΗ ΚΛΑΣΙΚΟΥ ΑΥΤΟΜΑΤΟΥ ΕΛΕΓΧΟΥ ΜΕ ΧΡΗΣΗ ΤΟΥ MATLAB.
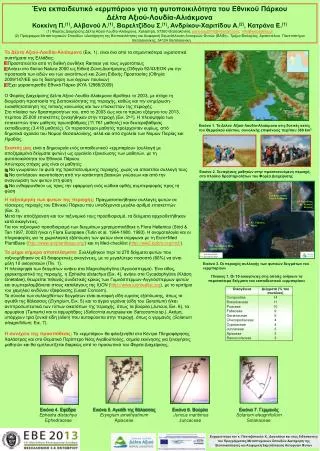
ΠΕΡΙΓΡΑΦΗ ΤΟΥ ΠΡΑΓΜΑΤΙΚΟΥ ΣΥΣΤΗΜΑΤΟΣ ΑΝΑΣΤΡΟΦΟΥ ΕΚΚΡΕΜΟΥΣ ΤΕΧΝΟΛΟΓΙΚΟ ΕΚΠΑΙΔΕΥΤΙΚΟ ΙΔΡΥΜΑ ΣΕΡΡΩΝ ΣΧΟΛΗ ΤΕΧΝΟΛΟΓΙΚΩΝ ΕΦΑΡΜΟΓΩΝΤΜΗΜΑ ΠΛΗΡΟΦΟΡΙΚΗΣ & ΕΠΙΚΟΙΝΩΝΙΩΝ Τα μέρη τα οποία αποτελείται το πραγματικό μοντέλο του ανάστροφου εκκρεμούς δεν είναι τίποτα άλλο από ένα βαγόνι τοποθετημένο πάνω σε δύο ράγες και μία ράβδο σε όρθια θέση η οποία είναι βιδωμένη πάνω στο βαγόνι και μπορεί να κάνει τις ίδιες κινήσεις με αυτές του βαγονιού
ΤΕΧΝΟΛΟΓΙΚΟ ΕΚΠΑΙΔΕΥΤΙΚΟ ΙΔΡΥΜΑ ΣΕΡΡΩΝ ΣΧΟΛΗ ΤΕΧΝΟΛΟΓΙΚΩΝ ΕΦΑΡΜΟΓΩΝΤΜΗΜΑ ΠΛΗΡΟΦΟΡΙΚΗΣ & ΕΠΙΚΟΙΝΩΝΙΩΝ ΓΙΑΤΙ ΜΑΣ ΕΝΔΙΑΦΕΡΕΙ Η ΜΕΛΕΤΗ ΤΟΥ ΚΑΙ ΠΟΙΟΙ ΟΙ ΣΤΟΧΟΙ ΜΑΣ Μας ενδιαφέρει γιατί μπορεί να βρει εφαρμογή σε αρκετά συστήματα που έχουν παρόμοια λειτουργία με το εκκρεμές μερικά από αυτά είναι: • Το αρχικό στάδιο πτήσης ενός πύραυλου. • Ο ρομποτικός βραχίονας των robot’s • Η ισορροπία ακόμη και του ίδιου του ανθρώπου τόσο όταν είναι σε κίνηση όσο και όταν παραμένει στάσιμος σε ένα σημείο.
ΤΕΧΝΟΛΟΓΙΚΟ ΕΚΠΑΙΔΕΥΤΙΚΟ ΙΔΡΥΜΑ ΣΕΡΡΩΝ ΣΧΟΛΗ ΤΕΧΝΟΛΟΓΙΚΩΝ ΕΦΑΡΜΟΓΩΝΤΜΗΜΑ ΠΛΗΡΟΦΟΡΙΚΗΣ & ΕΠΙΚΟΙΝΩΝΙΩΝ Οι στόχοι που έχουμε είναι: • Το όλο σύστημα να έρχεται στην επιθυμητή θέση ανάλογα με την είσοδο που του δίνεται. • Η ράβδος θα πρέπει να παραμένει όρθια σε οποια ενέργεια και αν εκτελείται από το σύστημα κάθε φορά. • Το σύστημα θα πρέπει να αντεπεξέρχεται κάτω από διάφορους άλλους «ανεπιθύμητους» παράγοντες που δεν ήταν αναμενόμενοι όπως ο θόρυβος και οι διάφορες αλλαγές των αρχικών παραμέτρων.
ΤΕΧΝΟΛΟΓΙΚΟ ΕΚΠΑΙΔΕΥΤΙΚΟ ΙΔΡΥΜΑ ΣΕΡΡΩΝ ΣΧΟΛΗ ΤΕΧΝΟΛΟΓΙΚΩΝ ΕΦΑΡΜΟΓΩΝΤΜΗΜΑ ΠΛΗΡΟΦΟΡΙΚΗΣ & ΕΠΙΚΟΙΝΩΝΙΩΝ TO ΜΑΘΗΜΑΤΙΚΟ ΜΟΝΤΕΛΟ ΤΟΥ ΑΝΑΣΤΡΟΦΟΥ ΕΚΚΡΕΜΟΥΣ Το μαθηματικό μοντέλο του ανάστροφου εκκρεμούς περιγράφεται από μία διανυσματική κατάσταση:x(t)=col(x1(t),x2(t),x3(t),x4(t)) Όπου: x1: η θέση του βαγονιού, x2: η γωνία του εκκρεμούς, x3: η ταχύτητα του βαγονιού και x4: η γωνιακή ταχύτητα του εκκρεμούς. Στο βαγόνι εφαρμόζεται μία ελεγχόμενη δύναμη F -παράλληλη στη ράγα-
ΤΕΧΝΟΛΟΓΙΚΟ ΕΚΠΑΙΔΕΥΤΙΚΟ ΙΔΡΥΜΑ ΣΕΡΡΩΝ ΣΧΟΛΗ ΤΕΧΝΟΛΟΓΙΚΩΝ ΕΦΑΡΜΟΓΩΝΤΜΗΜΑ ΠΛΗΡΟΦΟΡΙΚΗΣ & ΕΠΙΚΟΙΝΩΝΙΩΝ ΟΙ ΕΞΙΣΩΣΕΙΣ ΤΟΥ ΣΥΣΤΗΜΑΤΟΣ
ΤΕΧΝΟΛΟΓΙΚΟ ΕΚΠΑΙΔΕΥΤΙΚΟ ΙΔΡΥΜΑ ΣΕΡΡΩΝ ΣΧΟΛΗ ΤΕΧΝΟΛΟΓΙΚΩΝ ΕΦΑΡΜΟΓΩΝΤΜΗΜΑ ΠΛΗΡΟΦΟΡΙΚΗΣ & ΕΠΙΚΟΙΝΩΝΙΩΝ OI ΠΑΡΑΜΕΤΡΟΙ ΤΟΥ ΣΥΣΤΗΜΑΤΟΣ mpw : η μάζα του φορτίου [kg] mps : η μάζα του ράβδου [kg] lp : το μήκος της ράβδου [m] lpo: η απόσταση μεταξύ του κέντρου της μάζας της ράβδου και του άξονα περιστροφής [m] lpwo: η απόσταση μεταξύ του κέντρου της μάζας του φορτίου και της περιστροφής του άξονα του εκκρεμούς [m]. lc: το μήκος του φορτίου [m]. lco: η απόσταση μεταξύ του κέντρου της μάζας φορτίων και της περιστροφής του άξονα του εκκρεμούς [m]. rp: η ακτίνα του πόλου [m]. rc: η ακτίνα του φορτίου [m] mc: η ισοδύναμη μάζα του βαγονιού, των τροχαλιών και του συνεχούς στροφέα. m: ισοδύναμη μάζα εκκρεμούς και κάρου [kg] l: απόσταση από τον άξονα περιστροφής και το κέντρο της μάζας του συστήματος fc: δυναμικός συντελεστής τριβής του κάρου fs: στατικός συντελεστής τριβής του κάρου fp: περιστροφικός συντελεστής τριβής Jp: στιγμή αδράνειας του εκκρεμούς όσον αφορά τον άξονα περιστροφής g: βαρύτητα p1: δύναμη ελέγχου στην αναλογία σημάτων PWM p2: δύναμη ελέγχου στην αναλογία ταχύτητας του κάρου umax: μέγιστη παραγόμενη τιμή σήματος από το PWM R1: μήκος της ράγας T: περίοδος του εκκρεμούς J: στιγμή της αδράνειας
ΤΕΧΝΟΛΟΓΙΚΟ ΕΚΠΑΙΔΕΥΤΙΚΟ ΙΔΡΥΜΑ ΣΕΡΡΩΝ ΣΧΟΛΗ ΤΕΧΝΟΛΟΓΙΚΩΝ ΕΦΑΡΜΟΓΩΝΤΜΗΜΑ ΠΛΗΡΟΦΟΡΙΚΗΣ & ΕΠΙΚΟΙΝΩΝΙΩΝ TO ΜΟΝΤΕΛΟΣΧΕΔΙΑΣΜΕΝΟ ΣΤΟ SIMULINK
ΤΕΧΝΟΛΟΓΙΚΟ ΕΚΠΑΙΔΕΥΤΙΚΟ ΙΔΡΥΜΑ ΣΕΡΡΩΝ ΣΧΟΛΗ ΤΕΧΝΟΛΟΓΙΚΩΝ ΕΦΑΡΜΟΓΩΝΤΜΗΜΑ ΠΛΗΡΟΦΟΡΙΚΗΣ & ΕΠΙΚΟΙΝΩΝΙΩΝ ΤΕΧΝΙΚΗ ΕΛΕΓΧΟΥ Η τεχνική ελέγχου από ακολουθήσαμε είναι ο γραμμικός έλεγχος με ανατροφοδότηση. Έννοια της ανατροφοδότησης: Η ανατροφοδότηση αναφέρεται στα κλειστά συστήματα τα οποία η είσοδος u(t) είναι συνάρτηση της εξόδου του y(t). Σε ένα σύστημα η είσοδος u(t) δεν παράγεται απ’ ευθείας από μία γεννήτρια αλλά είναι το άθροισμα και ενός πρόσθετου σήματος που προέρχεται από μία συσκευή που ονομάζουμε ελεγκτή
ΤΕΧΝΟΛΟΓΙΚΟ ΕΚΠΑΙΔΕΥΤΙΚΟ ΙΔΡΥΜΑ ΣΕΡΡΩΝ ΣΧΟΛΗ ΤΕΧΝΟΛΟΓΙΚΩΝ ΕΦΑΡΜΟΓΩΝΤΜΗΜΑ ΠΛΗΡΟΦΟΡΙΚΗΣ & ΕΠΙΚΟΙΝΩΝΙΩΝ ΓΡΑΜΜΙΚΑ ΣΥΣΤΗΜΑΤΑ Ένας τρόπος που μπορώ να περιγράψω γραμμικά συστήματα είναι αυτός στον χώρο των καταστάσεων, ένα τέτοιο σύστημα μπορεί να περιγράφεται από εξισώσεις: όπου x(t)n-διάστατο διάνυσμα κατάστασης και y(t)p-σιάστατο διάνυσμα εξόδου, u(t) είναι το σήμα εισόδου. Θετικός παράγοντας στην τεχνική ελέγχου με γραμμικό έλεγχο και ανατροφοδότηση είναι ότι είναι μία τεχνική αρκετών ετών και έχουν ειπωθεί αρκετά κριτήρια ελέγχου και υπάρχει πλούσια βιβλιογραφία γύρω από αυτό τόσο σε βιβλία όσο και σε ηλεκτρονική μορφή. Αρνητικός παράγοντας είναι ότι θεωρείται απαραίτητη η γνώση των μαθηματικών εξισώσεων που περιγράφουν το σύστημα.
ΤΕΧΝΟΛΟΓΙΚΟ ΕΚΠΑΙΔΕΥΤΙΚΟ ΙΔΡΥΜΑ ΣΕΡΡΩΝ ΣΧΟΛΗ ΤΕΧΝΟΛΟΓΙΚΩΝ ΕΦΑΡΜΟΓΩΝΤΜΗΜΑ ΠΛΗΡΟΦΟΡΙΚΗΣ & ΕΠΙΚΟΙΝΩΝΙΩΝ Γραμμικοποίηση του μοντέλου μας Aρχικά το σύστημα είναι μη γραμμικό, πράγμα που σημαίνει πως η μελέτη του καθίσταται αδύνατη για το λόγο αυτό το γραμμικοποιούμε για να είναι εφικτή η μελέτη του. Για τη γραμμικοποίηση του μοντέλου μας χρησιμοποιήσαμε την εντολή linmod η οποία συντάσσεται ως εξής: [A,B,C,D]=linmod(‘name’); όπου Α,Β,C,D είναι οι μεταβατικοί πίνακες κατάστασης και name είναι το όνομα με το οποίο έχουμε αποθηκεύσει το αρχικό ανοικτό σύστημα. Δίνοντας στο command line του MatLab την εντολή [Α,B,C,D]=linmod(‘svol’) θα προκύψουν οι εξής πίνακες κατάστασης:
ΤΕΧΝΟΛΟΓΙΚΟ ΕΚΠΑΙΔΕΥΤΙΚΟ ΙΔΡΥΜΑ ΣΕΡΡΩΝ ΣΧΟΛΗ ΤΕΧΝΟΛΟΓΙΚΩΝ ΕΦΑΡΜΟΓΩΝΤΜΗΜΑ ΠΛΗΡΟΦΟΡΙΚΗΣ & ΕΠΙΚΟΙΝΩΝΙΩΝ ΑΣΤΑΘΕΙΑ ΑΝΟΙΚΤΟΥ ΣΥΣΤΗΜΑΤΟΣ Αρχικά δοκιμάζουμε να τρέξουμε το ανοικτό σύστημα σαν είσοδο θα δώσουμε ένα απλό παλμό (step) πλάτους 1 και διάρκειας 100(seconds). Ενώ έχουμε τέσσερις εξόδους οι οποίες είναι: x1: θέση βαγονιού. x2: γωνία ράβδου. x3: ταχύτητα βαγονιού x4: γωνιακή ταχύτητα
ΤΕΧΝΟΛΟΓΙΚΟ ΕΚΠΑΙΔΕΥΤΙΚΟ ΙΔΡΥΜΑ ΣΕΡΡΩΝ ΣΧΟΛΗ ΤΕΧΝΟΛΟΓΙΚΩΝ ΕΦΑΡΜΟΓΩΝΤΜΗΜΑ ΠΛΗΡΟΦΟΡΙΚΗΣ & ΕΠΙΚΟΙΝΩΝΙΩΝ ΠΟΛΟΙ ΤΟΥ ΣΥΣΤΗΜΑΤΟΣ Ένα κριτήριο που θα πρέπει να εκπληρώνεται για να είναι ένα σύστημα ευσταθές είναι ότι όλοι οι πόλοι του συστήματος θα πρέπει να βρίσκονται στο αρνητικό μιγαδικό ημιεπίπεδο. Αυτό το κριτήριο στο ανοικτό μας σύστημα δεν εκπληρώνεται αφού παρατηρούμε πώς δεν βρίσκονται όλοι οι πόλοι στο αρνητικό μιγαδικό ημιεπίπεδο.
ΤΕΧΝΟΛΟΓΙΚΟ ΕΚΠΑΙΔΕΥΤΙΚΟ ΙΔΡΥΜΑ ΣΕΡΡΩΝ ΣΧΟΛΗ ΤΕΧΝΟΛΟΓΙΚΩΝ ΕΦΑΡΜΟΓΩΝΤΜΗΜΑ ΠΛΗΡΟΦΟΡΙΚΗΣ & ΕΠΙΚΟΙΝΩΝΙΩΝ Αυτό που βλέπουμε είναι πως το σύστημα είναι ασταθές και ουσιαστικά μας είναι άχρηστο. Βλέπουμε πως η θέση του βαγονιού απειρίζεται.(scope). Η ράβδος δεν έρχεται σε ισορροπία αυτό μας το μαρτυρά η γωνία στο διάγραμμα x2.
ΤΕΧΝΟΛΟΓΙΚΟ ΕΚΠΑΙΔΕΥΤΙΚΟ ΙΔΡΥΜΑ ΣΕΡΡΩΝ ΣΧΟΛΗ ΤΕΧΝΟΛΟΓΙΚΩΝ ΕΦΑΡΜΟΓΩΝΤΜΗΜΑ ΠΛΗΡΟΦΟΡΙΚΗΣ & ΕΠΙΚΟΙΝΩΝΙΩΝ ΕΠΑΝΑΤΟΠΟΘΕΤΗΣΗ ΠΟΛΩΝ (place) Για να εκπληρώσουμε το κριτήριο ελέγχου και να δημιουργήσουμε ένα ευσταθές σύστημα δεν έχουμε παρά να κάνουμε μία επανατοποθέτηση των πόλων στα σημεία που εμείς θέλουμε να βρίσκονται. Για να γίνει αυτό θα πρέπει να δημιουργήσουμε ένα κλειστό σύστημα το οποίο θα βρίσκεται σε ανατροφοδότηση. Το ανοικτό μας σύστημα μας έδινε 4 εξόδους: ΘΕΣΗ ΒΑΓΟΝΙΟΥ x1 ΓΩΝΙΑ ΡΑΒΔΟΥ x2 ΤΑΧΥΤΗΤΑ ΣΥΣΤΗΜΑΤΟΣ x3 ΓΩΝΙΑΚΗ ΤΑΧΥΤΗΤΑ ΣΥΣΤΗΜΑΤΟΣ x4 Αυτό που θα κάνουμε είναι να τοποθετήσουμε τις τέσσερις εξόδους μας σε αρνητική ανατροφοδότηση με την είσοδο του συστήματος.
ΤΕΧΝΟΛΟΓΙΚΟ ΕΚΠΑΙΔΕΥΤΙΚΟ ΙΔΡΥΜΑ ΣΕΡΡΩΝ ΣΧΟΛΗ ΤΕΧΝΟΛΟΓΙΚΩΝ ΕΦΑΡΜΟΓΩΝΤΜΗΜΑ ΠΛΗΡΟΦΟΡΙΚΗΣ & ΕΠΙΚΟΙΝΩΝΙΩΝ Ουσιαστικά η είσοδος στο ανοικτό σύστημα ήταν η τάση που έδινε το μοτέρσε (Volt) Στο νέο κλειστό σύστημα η είσοδος είναι η επιθυμητή θέση που θέλουμε να έρθει το σύστημα (η οποία αφαιρείται από την πραγματική που βρίσκεται το βαγόνι
ΤΕΧΝΟΛΟΓΙΚΟ ΕΚΠΑΙΔΕΥΤΙΚΟ ΙΔΡΥΜΑ ΣΕΡΡΩΝ ΣΧΟΛΗ ΤΕΧΝΟΛΟΓΙΚΩΝ ΕΦΑΡΜΟΓΩΝΤΜΗΜΑ ΠΛΗΡΟΦΟΡΙΚΗΣ & ΕΠΙΚΟΙΝΩΝΙΩΝ Αυτό που παρατηρούμε στο νέο κλειστό μας σύστημα είναι πως στην ανατροφοδότηση έχουν προστεθεί τέσσερις ελεγκτές ένας σε κάθε έξοδο του συστήματος Αυτοί οι τέσσερις ελεγκτές θα ενημερωθούν για βάρη τους από την place έτσι ώστε να αναπροσαρμόζουν το σήμα εισόδου για να δημιουργηθεί ένα ευσταθές σύστημα. Ιδιαίτερα ο ελεγκτής που αντιστοιχεί στη θέση παίρνει σαν είσοδο την πραγματική τιμή της θέσης μείον την επιθυμητή θέση.
ΤΕΧΝΟΛΟΓΙΚΟ ΕΚΠΑΙΔΕΥΤΙΚΟ ΙΔΡΥΜΑ ΣΕΡΡΩΝ ΣΧΟΛΗ ΤΕΧΝΟΛΟΓΙΚΩΝ ΕΦΑΡΜΟΓΩΝΤΜΗΜΑ ΠΛΗΡΟΦΟΡΙΚΗΣ & ΕΠΙΚΟΙΝΩΝΙΩΝ ΤΟ ΝΈΟ ΕΥΣΤΑΘΕΣ ΣΥΣΤΗΜΑ Δίνοντας στην place την επιθυμητή τοποθέτηση των πόλων στα σημεία : -2.5, -1.5, -13, -4.5 αυτήν μας επιστρέφει τα εξής βάρη τα οποία είναι και οι τέσσερις αντίστοιχες τιμές των ελεγκτών : -0.1955, 2.3166, -0.4112, 0.2696 Βλέπουμε πλέον πως όλοι οι πόλοι του συστήματος μας βρίσκονται στο αρνητικό μιγαδικό ημιεπίπεδο
ΤΕΧΝΟΛΟΓΙΚΟ ΕΚΠΑΙΔΕΥΤΙΚΟ ΙΔΡΥΜΑ ΣΕΡΡΩΝ ΣΧΟΛΗ ΤΕΧΝΟΛΟΓΙΚΩΝ ΕΦΑΡΜΟΓΩΝΤΜΗΜΑ ΠΛΗΡΟΦΟΡΙΚΗΣ & ΕΠΙΚΟΙΝΩΝΙΩΝ Τα γραφήματα θέσης και γωνίας μας επιβεβαιώνουν τη σταθερότητα του συστήματος Σαν είσοδο στο σύστημα δίνουμε επιθυμητές θέσεις που θέλουμε να πάει το βαγόνι
ΤΕΧΝΟΛΟΓΙΚΟ ΕΚΠΑΙΔΕΥΤΙΚΟ ΙΔΡΥΜΑ ΣΕΡΡΩΝ ΣΧΟΛΗ ΤΕΧΝΟΛΟΓΙΚΩΝ ΕΦΑΡΜΟΓΩΝΤΜΗΜΑ ΠΛΗΡΟΦΟΡΙΚΗΣ & ΕΠΙΚΟΙΝΩΝΙΩΝ ΔΟΚΙΜΕΣ ΕΥΡΕΣΗΣ ΚΑΛΥΤEΡΟΥ ΕΛΕΓΚΤΗ Στην προσπάθεια μας να βρούμε ένα καλύτερο ελεγκτή από τον υπάρχον κάναμε διάφορες μικρές αλλαγές στις τιμές των βαρών των ελεγκτών συγκρίναμε τις επιδόσεις τους με βάση τη ταχύτητα απόκρισης και τον σχηματισμό γωνίας και επιλέξαμε τον καλύτερο. 1ος ελεγκτής ΜΕ ΒΑΡΗ [-0.195 2.316 -0.411 0.269] είναι οι αρχικές τιμές που μας έδωσε η place 2ος ελεγκτής MΕ ΒΑΡΗ [-0.22 2.6 -0.420 0.240] είναι τιμές που δώσαμε με μικρές αποκλίσεις από τις αρχικές 3ος ελεγκτής ΜΕ ΒΑΡΗ [-0.34 2.4 -0.47 0.260]
ΤΕΧΝΟΛΟΓΙΚΟ ΕΚΠΑΙΔΕΥΤΙΚΟ ΙΔΡΥΜΑ ΣΕΡΡΩΝ ΣΧΟΛΗ ΤΕΧΝΟΛΟΓΙΚΩΝ ΕΦΑΡΜΟΓΩΝΤΜΗΜΑ ΠΛΗΡΟΦΟΡΙΚΗΣ & ΕΠΙΚΟΙΝΩΝΙΩΝ 1ος ελεγκτής Σαν είσοδο για την επιλογή του καλύτερου ελεγκτή δώσαμε ένα απλό παλμό διάρκειας 10second και πλάτους 1 ΑΠΟΤΕΛΕΣΜΑΤΑ ΔΟΚΙΜΩΝ
ΤΕΧΝΟΛΟΓΙΚΟ ΕΚΠΑΙΔΕΥΤΙΚΟ ΙΔΡΥΜΑ ΣΕΡΡΩΝ ΣΧΟΛΗ ΤΕΧΝΟΛΟΓΙΚΩΝ ΕΦΑΡΜΟΓΩΝΤΜΗΜΑ ΠΛΗΡΟΦΟΡΙΚΗΣ & ΕΠΙΚΟΙΝΩΝΙΩΝ 2ος ελεγκτής 3ος ελεγκτής
ΤΕΧΝΟΛΟΓΙΚΟ ΕΚΠΑΙΔΕΥΤΙΚΟ ΙΔΡΥΜΑ ΣΕΡΡΩΝ ΣΧΟΛΗ ΤΕΧΝΟΛΟΓΙΚΩΝ ΕΦΑΡΜΟΓΩΝΤΜΗΜΑ ΠΛΗΡΟΦΟΡΙΚΗΣ & ΕΠΙΚΟΙΝΩΝΙΩΝ
ΤΕΧΝΟΛΟΓΙΚΟ ΕΚΠΑΙΔΕΥΤΙΚΟ ΙΔΡΥΜΑ ΣΕΡΡΩΝ ΣΧΟΛΗ ΤΕΧΝΟΛΟΓΙΚΩΝ ΕΦΑΡΜΟΓΩΝΤΜΗΜΑ ΠΛΗΡΟΦΟΡΙΚΗΣ & ΕΠΙΚΟΙΝΩΝΙΩΝ ΕΠΙΛΟΓΗ ΕΛΕΓΚΤΗ Με βάση λοιπόν τα κριτήρια που θέσαμε για την επιλογή του καλύτερου ελεγκτή (ταχύτητα απόκρισης και ανθεκτικότητα στο θόρυβο) επιλέγουμε το 2ο ελεγκτή ο οποίος θεωρούμε πως θα μας εξασφαλίσει ένα σύστημα που τα συνδυάζει και τα δύο. Ενώ το σύστημα που θα είχαμε αν επιλέγαμε τον 1ο ελεγκτή μπορεί μεν να ήταν ικανοποιητικό κάτω από συνθήκες θορύβου όμως η ταχύτητα του θα ήταν απογοητευτική. Στην περίπτωση που επιλέγαμε τον 3ο ελεγκτή θα είχαμε ένα πολύ γρήγορο σύστημα με πολύ κακή συμπεριφορά όμως κάτω από συνθήκες θορύβου.
ΤΕΧΝΟΛΟΓΙΚΟ ΕΚΠΑΙΔΕΥΤΙΚΟ ΙΔΡΥΜΑ ΣΕΡΡΩΝ ΣΧΟΛΗ ΤΕΧΝΟΛΟΓΙΚΩΝ ΕΦΑΡΜΟΓΩΝΤΜΗΜΑ ΠΛΗΡΟΦΟΡΙΚΗΣ & ΕΠΙΚΟΙΝΩΝΙΩΝ
ΤΕΧΝΟΛΟΓΙΚΟ ΕΚΠΑΙΔΕΥΤΙΚΟ ΙΔΡΥΜΑ ΣΕΡΡΩΝ ΣΧΟΛΗ ΤΕΧΝΟΛΟΓΙΚΩΝ ΕΦΑΡΜΟΓΩΝΤΜΗΜΑ ΠΛΗΡΟΦΟΡΙΚΗΣ & ΕΠΙΚΟΙΝΩΝΙΩΝ ΑΝΟΧΗ ΣΥΣΤΗΜΑΤΟΣ ΣΤΟ ΘΟΡΥΒΟ Η εισαγωγή θορύβου στο σύστημά μας έγινε προσθέτοντας το έτοιμο block της βιβλιοθήκης του Simulink noise ratio στην είσοδο των ελεγκτών μαζί με το ωφέλιμο σήμα.. Το noise power στο parameters κάθε block καθορίζει την ισχύ του θορύβου
ΤΕΧΝΟΛΟΓΙΚΟ ΕΚΠΑΙΔΕΥΤΙΚΟ ΙΔΡΥΜΑ ΣΕΡΡΩΝ ΣΧΟΛΗ ΤΕΧΝΟΛΟΓΙΚΩΝ ΕΦΑΡΜΟΓΩΝΤΜΗΜΑ ΠΛΗΡΟΦΟΡΙΚΗΣ & ΕΠΙΚΟΙΝΩΝΙΩΝ Οι αρχικές τιμές θορύβου που δώσαμε και η συμπεριφορά του συστήματος για τυχαία σήματα εισόδου Noise power x1 στον ελεγκτή της θέσης του βαγονιού [0.3] Noise power x2 στον ελεγκτή της γωνίας [0.00001] Noise power x3 στον ελεγκτή της ταχύτητας [0.003] Noise power x4 στον ελεγκτή της γωνιακής ταχύτητας [0.1]
ΤΕΧΝΟΛΟΓΙΚΟ ΕΚΠΑΙΔΕΥΤΙΚΟ ΙΔΡΥΜΑ ΣΕΡΡΩΝ ΣΧΟΛΗ ΤΕΧΝΟΛΟΓΙΚΩΝ ΕΦΑΡΜΟΓΩΝΤΜΗΜΑ ΠΛΗΡΟΦΟΡΙΚΗΣ & ΕΠΙΚΟΙΝΩΝΙΩΝ Το σύστημά μας παρουσιάζει μία ικανοποιητική συμπεριφορά ακόμα και με την παρουσία θορύβου.
ΤΕΧΝΟΛΟΓΙΚΟ ΕΚΠΑΙΔΕΥΤΙΚΟ ΙΔΡΥΜΑ ΣΕΡΡΩΝ ΣΧΟΛΗ ΤΕΧΝΟΛΟΓΙΚΩΝ ΕΦΑΡΜΟΓΩΝΤΜΗΜΑ ΠΛΗΡΟΦΟΡΙΚΗΣ & ΕΠΙΚΟΙΝΩΝΙΩΝ ΑΥΞΗΣΗ ΙΣΧΥΣ ΘΟΡΥΒΟΥ Noise power x1 στον ελεγκτή της θέσης του βαγονιού [1.8] Noise power x2 στον ελεγκτή της γωνίας [0.011] Noise power x3 στον ελεγκτή της ταχύτητας [0.9] Noise power x4 στον ελεγκτή της γωνιακής ταχύτητας [0.23] Βλέπουμε πως το σύστημα έχει ξεπεράσει τα όρια ανοχής του και διαλύεται
ΤΕΧΝΟΛΟΓΙΚΟ ΕΚΠΑΙΔΕΥΤΙΚΟ ΙΔΡΥΜΑ ΣΕΡΡΩΝ ΣΧΟΛΗ ΤΕΧΝΟΛΟΓΙΚΩΝ ΕΦΑΡΜΟΓΩΝΤΜΗΜΑ ΠΛΗΡΟΦΟΡΙΚΗΣ & ΕΠΙΚΟΙΝΩΝΙΩΝ ΑΛΛΑΓΗ ΠΑΡΑΜΕΤΡΩΝ ΚΑΙ ΑΝΟΧΗ ΣΥΣΤΗΜΑΤΟΣ ΣΤΑ ΝΕΑ ΔΕΔΟΜΕΝΑ Μετά τη δοκιμή στο θόρυβο θα δούμε πως αποκρίνεται το σύστημα μετά από αλλαγές στις τιμές δύο βασικών παραμέτρων του συστήματος: Οι παράμετροι που θα αλλάξουμε: m [kg] = μάζα στη συνολική μάζα του συστήματος. lp [m] = μήκος της ράβδου Αναμενόμενο είναι πως όσο μεγαλώνουν αυτοί οι δύο παράγοντες η ευστάθεια του συστήματος επιτυγχάνεται όλο και πιο δύσκολα ενώ υπάρχει και ένα ανώτατο όριο ανοχής το οποίο αν ξεπεραστεί τότε το σύστημα διαλύεται.
ΤΕΧΝΟΛΟΓΙΚΟ ΕΚΠΑΙΔΕΥΤΙΚΟ ΙΔΡΥΜΑ ΣΕΡΡΩΝ ΣΧΟΛΗ ΤΕΧΝΟΛΟΓΙΚΩΝ ΕΦΑΡΜΟΓΩΝΤΜΗΜΑ ΠΛΗΡΟΦΟΡΙΚΗΣ & ΕΠΙΚΟΙΝΩΝΙΩΝ Αρχικά θα αλλάξουμε τις τιμές των παραμέτρων σε: m=1.5[kg] από 0,872[Kg] και lp=0.7[m] από 0,5[m] Σαν είσοδο θα δώσουμε ένα απλό παλμό πλάτους 1 και διάρκειας 10(sec) Βλέπουμε και στα γραφήματα πως το σύστημα ανταποκρίνεται αρκετά καλά (*ΜΟΒ ΧΡΩΜΑ ΕΞΟΔΟΣ ΤΟΥ ΣΥΣΤΗΜΑΤΟΣ ΚΙΤΡΙΝΟ ΧΡΩΜΑ ΕΠΙΘΥΜΗΤΗ ΘΕΣΗ ΕΙΣΟΔΟΥ)
ΤΕΧΝΟΛΟΓΙΚΟ ΕΚΠΑΙΔΕΥΤΙΚΟ ΙΔΡΥΜΑ ΣΕΡΡΩΝ ΣΧΟΛΗ ΤΕΧΝΟΛΟΓΙΚΩΝ ΕΦΑΡΜΟΓΩΝΤΜΗΜΑ ΠΛΗΡΟΦΟΡΙΚΗΣ & ΕΠΙΚΟΙΝΩΝΙΩΝ Δοκιμάζουμε να αυξήσουμε ακόμα περισσότερο και τη μάζα και το ύψος της ράβδου: Τη μάζα από m=1.5 [kg] σε m=2[kg] Το μήκος της ράβδου από lp=0.7[m]σε lp=0.8[m] Αυτό που πλέον διαπιστώνουμε είναι ότι το σύστημα αδυνατεί να αντεπεξέλθει με τα νέα δεδομένα και διαλύεται.
ΤΕΧΝΟΛΟΓΙΚΟ ΕΚΠΑΙΔΕΥΤΙΚΟ ΙΔΡΥΜΑ ΣΕΡΡΩΝ ΣΧΟΛΗ ΤΕΧΝΟΛΟΓΙΚΩΝ ΕΦΑΡΜΟΓΩΝΤΜΗΜΑ ΠΛΗΡΟΦΟΡΙΚΗΣ & ΕΠΙΚΟΙΝΩΝΙΩΝ ΑΝΑΚΕΦΑΛΑΙΩΣΗ Στην εργασία αυτή μελετήσαμε το σύστημα του ανάστροφου εκκρεμούς Αρχικά περιγράψαμε το πραγματικό μοντέλο του ανάστροφου εκκρεμούς Εν συνεχεία είδαμε το μαθηματικό μοντέλο του ανάστροφου εκκρεμούς και εξηγήσαμε τον τρόπο που το εισάγαμε στον υπολογιστή μας. Περιγράψαμε την τεχνική που ακολουθήσαμε για την μελέτη του συστήματος:Τεχνική με γραμμικό έλεγχο και ανατροφοδότηση Παρατηρήσαμε την αστάθεια του ανοικτού συστήματος και εξηγήσαμε τον ρόλο που παίζουν οι πόλοι του συστήματος. Γραμμικοποιήσαμε το σύστημα μας για να είναι εφικτή η μελέτη του και σχεδιάσαμε το κλειστό σύστημα επανατοποθετώντας του πόλους του συστήματος στα σημεία που εμείς θέλαμε για να δημιουργήσουμε ένα ευσταθές σύστημα Επιλέξαμε τον καλύτερο ελεγκτή για το σύστημά μας και παρατηρήσαμε την ανοχή του συστήματος στο θόρυβο καθώς και στις αλλαγές των μεταβλητών του συστήματος.
ΤΕΧΝΟΛΟΓΙΚΟ ΕΚΠΑΙΔΕΥΤΙΚΟ ΙΔΡΥΜΑ ΣΕΡΡΩΝ ΣΧΟΛΗ ΤΕΧΝΟΛΟΓΙΚΩΝ ΕΦΑΡΜΟΓΩΝΤΜΗΜΑ ΠΛΗΡΟΦΟΡΙΚΗΣ & ΕΠΙΚΟΙΝΩΝΙΩΝ ΤΕΛΟΣΕΥΧΑΡΙΣΤΩ ΓΙΑ ΤΗ ΒΟΗΘΕΙΑΣΕ ΟΛΗ ΤΗ ΔΙΑΡΚΕΙΑ ΑΥΤΗΣ ΤΗΣ ΕΡΓΑΣΙΑΣ ΤΟΝ ΕΠΙΒΛΕΠΩΝ ΚΑΘΗΓΗΤΗ ΤΗΣ ΠΤΥΧΙΑΚΗΣ:Δρ. Σταύρο Βολογιαννίδη
ΤΕΧΝΟΛΟΓΙΚΟ ΕΚΠΑΙΔΕΥΤΙΚΟ ΙΔΡΥΜΑ ΣΕΡΡΩΝ ΣΧΟΛΗ ΤΕΧΝΟΛΟΓΙΚΩΝ ΕΦΑΡΜΟΓΩΝΤΜΗΜΑ ΠΛΗΡΟΦΟΡΙΚΗΣ & ΕΠΙΚΟΙΝΩΝΙΩΝ ΕΥΧΑΡΙΣΤΩ ΓΙΑ ΤΗΝ ΠΡΟΣΟΧΗ ΣΑΣ !