Download
1 / 19
190 likes | 219 Views
Run-to-Completion Non-Preemptive Scheduler. In These Notes. What is Scheduling? What is non-preemptive scheduling? Examples Run to completion (cooperative) scheduler in in rtc.c and rtc.h Note: if the code examples in the notes differ from the code in rtc.c or rtc.h, follow rtc.c or rtc.h.

E N D
In These Notes . . . • What is Scheduling? • What is non-preemptive scheduling? • Examples • Run to completion (cooperative) scheduler in in rtc.c and rtc.h • Note: if the code examples in the notes differ from the code in rtc.c or rtc.h, follow rtc.c or rtc.h
Approaches to Sharing the Processor (Scheduling) • We have seen two types of code in a program • Code in main, or a function called by main (possibly indirectly) • Code in interrupt service routines, executing asynchronously • This approach makes certain behavior difficult to implement • E.g. run Check_for_Overrun() every 28 milliseconds • Run Update_Display() every 100 milliseconds • Run Signal_Data_Available() 300 milliseconds after UART0 Rx interrupt occurs • Solution 1 • Use a timer peripheral. Set it to expire after the desired time delay. • Problem: Need a timer per event, or a function which makes one timer act like many based on a schedule of desired events. • Solution 2 • Break the code into tasks which will run periodically • Add a scheduler which runs the tasks at the right times • Scheduling: deciding which task to run next and then starting it running
Scheduling Rules • Define functions which need to run periodically to be tasks • If there is a task ready to run, then run it • Finish the current task before you start another one • “Run to completion” = non-preemptive • One task can’t preempt another task • If there is more than one task to start, run the highest priority task first
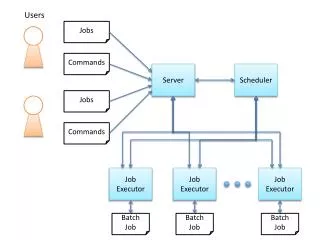
Task Task Task Task Delay Delay Delay Delay Ready Ready Ready Ready Implementing Scheduler Behavior • Keep a table with information on each task • Where the task starts – so we can run it • The period with which it should run • How long of a delay until it should run again • Decrement this timer every so often • Reload it with period when it overflows • Whether it is ready to run now • Whether it is enabled – so we can switch it on or off easily • Use a periodic timer ISR (e.g. a tick per millisecond) to update delay information in the table • Use scheduler to run tasks with ready = 1 Tick Timer ISR Scheduler
Task Table Initialization #define MAX_TASKS 5 // Set maximum number of tasks. Affects performance. typedef struct { int period; // period of task in ticks int delay; // time until next run int ready; // binary: 1 = “run now” int enabled; // active task? void (* task)(void); // address of function } task_t; task_t GBL_task_table[MAX_TASKS]; void init_Task_Table(void) { // Initialize all tasks entries to empty state int i; for (i=0 ; i<MAX_TASKS ; i++) { GBL_task_table[i].delay = 0; GBL_task_table[i].ready = 0; GBL_task_table[i].period = 0; GBL_task_table[i].enabled = 0; GBL_task_table[i].task = NULL; } }
Initialize Tick Timer Set up B0 timer to generate an interrupt every 1 millisecond UPDATE // default tb0 will be = 65536 (timer tick = 65536/24MHz ) // load tb0 with 1 ms*24MHz = 24,000 init_Task_Timers(); // Initialize all tasks tb0 = 24000; // 1 ms timer tick DISABLE_INTS tb0ic = 1; // Timer B0 overflow ENABLE_INTS tb0st = 1; // start timer B0
Update Task Table With Each Tick • On every time tick • Reduce Delay • If Delay becomes 0, mark task Ready to run and reload Delay with Period // Make sure to load the vector table with this ISR addr #pragma INTERRUPT tick_timer_intr void tick_timer_intr(void) { static char i; for (i=0 ; i<MAX_TASKS ; i++) { // If scheduled task if ((GBL_task_list[i].task != NULL) && (GBL_task_list[i].enabled == 1) && (GBL_task_list[i].delay != 0) ) { GBL_task_list[i].delay--; if (GBL_task_list[i].delay == 0){ GBL_task_list[i].ready = 1; GBL_task_list[i].delay = GBL_task_list[i].period; } // if delay == 0 } // if && && && } // for
A Simple Example • We will keep track of how long until the task will run (“delay”) and if it is scheduled to run now (“ready”)
Review of Scheduler Information • Scheduler provided in rtc.[c|h] • Details • Scheduler uses a software timer per task • All software timers are decremented using a timer tick based on the Timer B0 hardware overflow interrupt • Each task runs to completion before yielding control of MCU back to Scheduler (non-preemptive)
Run-to-Completion Scheduler API • Init_RTC_Scheduler(void) • Initialize tick timer B0 and task timers • Add Task(task, time period, priority) • task: address of task (function name without parentheses) • time period: period at which task will be run (in ticks) • priority: lower number is higher priority. Also is task number. • automatically enables task • return value: 1 – loaded successfully, 0 – unable to load • Remove Task(task) • removes task from scheduler. • Run Task(task number) • Signals the scheduler that task should run when possible and enables it • Run RTC Scheduler() • Run the scheduler! • Never returns • There must be at least one task scheduled to run before calling this function. • Enable_Task(task_number) and Disable_Task(task_number) • Set or clear enabled flag, controlling whether task can run or not • Reschedule_Task(task_number, new_period) • Changes the period at which the task runs. Also resets timer to that value.
Running the Scheduler void Run_RTC_Scheduler(void) { // Always running int i; GBL_run_scheduler = 1; while (1) { // Loop forever & Check each task for (i=0 ; i<MAX_TASKS ; i++) { // If this is a scheduled task if ((GBL_task_list[i].task != NULL) && (GBL_task_list[i].enabled == 1) && (GBL_task_list[i].ready == 1) ) { GBL_task_list[i].task(); // Run the task GBL_task_list[i].ready = 0; break; } // if && && } // for i } // while 1 }
Adding a Task int addTask(void (*task)(void), int time, int priority) { unsigned int t_time; /* Check for valid priority */ if (priority >= MAX_TASKS || priority < 0) return 0; /* Check to see if we are overwriting an already scheduled task */ if (GBL_task_list[priority].task != NULL) return 0; /* Schedule the task */ GBL_task_list[priority].task = task; GBL_task_list[priority].ready = 0; GBL_task_list[priority].delay = time; GBL_task_list[priority].period = time; GBL_task_list[priority].enabled = 1; return 1; }
Removing a Task void removeTask(void (* task)(void)) { int i; for (i=0 ; i<MAX_TASKS ; i++) { if (GBL_task_list[i].task == task) { GBL_task_list[i].task = NULL; GBL_task_list[i].delay = 0; GBL_task_list[i].period = 0; GBL_task_list[i].run = 0; GBL_task_list[i].enabled = 0; return; } } }
Enabling or Disabling a Task void Enable_Task(int task_number) { GBL_task_list[task_number].enabled = 1; } void Disable_Task(int task_number) { GBL_task_list[task_number].enabled = 0; }
Rescheduling a Task • Changes period of task and resets counter void Reschedule_Task(int task_number, int new_period) { GBL_task_list[task_number].period = new_period; GBL_task_list[task_number].delay = new_period; }
Start System To run RTC scheduler, first add the function (task): addTask(flash_redLED, 25, 3); addTask(sample_ADC, 500, 4); Then, the last thing to do in the main program is: Run_RTC_Scheduler(); // never returns
A More Complex Example • Note at the end, things “stack up” (one T3 missed)
Over-extended Embedded System • This is an “overextended” system because some tasks are missed – several times. There is not enough processor time to complete all of the work. This is covered in more detail in a future lecture.