Download
1 / 18
180 likes | 350 Views
基于 TMS320F2812 DSPs 的模糊自调整 PID 速度控制器的设计与实现. 摘要. 本文讨论了如何将模糊自调整 PID 控制器应用在交流调速系统中 , 着重于 TI 公司的最新 32 位定点 DSP 如何实现基于 TMS320F2812 的控制器用 C++ 语言模糊搜索方法 . 作者最后应用该控制器在 MCK2812 的 PMSM 速度可调整矢量控制器系统中 . 该控制器是 Technosoft 公司的运动控制的开发环境 . 结果表明该控制器明显改进系统的动态特性和静态特性 . 关键词 : 模糊自校正 PID 控制器 TMS320F2812 交流调速.

E N D
基于TMS320F2812 DSPs的模糊自调整PID速度控制器的设计与实现
摘要 • 本文讨论了如何将模糊自调整PID控制器应用在交流调速系统中,着重于TI公司的最新32位定点DSP如何实现基于TMS320F2812的控制器用C++语言模糊搜索方法.作者最后应用该控制器在MCK2812的PMSM速度可调整矢量控制器系统中.该控制器是Technosoft公司的运动控制的开发环境.结果表明该控制器明显改进系统的动态特性和静态特性. • 关键词:模糊自校正PID控制器 TMS320F2812 交流调速
绪论 • 近年来,人们逐渐将模糊自调整PID控制器应用在交流电机的速度控制中.对交流调速系统实现更高精度和更高速度的动态特性和静态特性更有效.但是交流调速运算法则对于实现系统模型的不耦合需要实现复合坐标变换,模糊自调整PID控制器需要在线计算修正PID三个参数.所以人们为了确保程序的实时运行必须使用高性能的处理器。因此,最新的TI公司的32位定点DSP的TMS320F2812是运动控制领域中最好的DSP芯片。它的哈佛结构适合于极强的高速运算和信号处理,在芯片上的两个事件管理能够简化外围电路,因此它的作用是为交流速度可调整系统的模糊自调整PID控制算法的实现作保证.
控制器的设计A.模糊自调整PID控制结构的要素 • 模糊自调整PID控制算法在线自调整PID的三个参数通过寻找PID三个参数,速度误差和转动速度误差率以及模糊逻辑控制原理之间的模糊关系以此来满足不同误差和误差变化率对PID参数不同的需求! • 如图1所示,r(t)是参考输入,e是速度误差,△e是速度误差变化率,E和△E是系统误差和系统误差变化率的反馈语言变量的模糊集.U(t)模糊PID控制器的最终输出.
Kp,Ki,Kd自调整的原理:根据被控对象在取样时间内的误差和误差变化率,我们可以确定参数修正大小.兼顾控制对象的静态特性(搞出或者低于给定值)和响应的动态特性(接近或者偏离给定值).它的运算法则是转换输入变量为模糊变量,然后利用模糊法则知识匹配它们.如果它们符合一些规则,执行该规则的结果.Kp,Ki,Kd自调整的原理:根据被控对象在取样时间内的误差和误差变化率,我们可以确定参数修正大小.兼顾控制对象的静态特性(搞出或者低于给定值)和响应的动态特性(接近或者偏离给定值).它的运算法则是转换输入变量为模糊变量,然后利用模糊法则知识匹配它们.如果它们符合一些规则,执行该规则的结果. • 传统PID控制器的离散表达式如下:
B,模糊语言变量值的确定,隶属函数和模糊控制规则1. 模糊语言变量值的确定 • 当选用的语言变量值时,要兼顾控制法则的灵活性和简单性和可行性的要求.本文以PMSM速度可调系统为例,两个输入语言变量E和△E以及三个输出语言变量 和 被定义为, 它代表:{负大,负小,灵,正小,正大}.根据实际情况,E, 和 积分区域为[-6 -5 -4 -3 -2 -1 0 1 2 3 4 5 6].语言变量值被分为五个变量模糊集如下:
2.隶属函数的确定 • 模糊隶属函数的形状比较陡,精度比较高,对系统的鲁棒性能比较好,当误差接近零时我们用精度比较高的三角隶属函数而当误差比较大的时候,我们用精度比较低的高斯隶属函数.
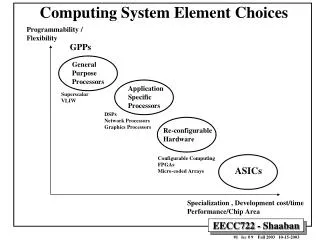
模糊自调整PID速度控制器的实现A.硬件设计 • 2003年由TI公司提出的TMS320F2812是一种高性能的32位定点DSP.迄今为止,该芯片是运动控制领域中性能最好的.与C240X系列芯片相比,TMS320F2812有一些独特的特点如下: • 高性能的32位CPU,高性能的静态CMOS技术-150MHZ • 1.8V的核心电压,3.3V的I/O电压,损耗非常低 • 芯片上包含128K*16的flash存储器和18K*16的SRAM以及4K的ROM,12位的ADC • 开发工具包括:ANSI C/C++ 编译器/汇编程序/连接器,代码集成编译环境IDE,DSP/BIOS,JTAG扫描控制器.程序开发员可以用例如C语言和C++高级语言开发程序,它将大大减少软件设计周期和确保最高的汇编效率. • 事件管理核心和C240X系列是兼容一致的.所以C24X系列和240X系列的用户可以方便的使用TMS3202812.
以PMSM矢量控制速度可调整系统为例,系统硬件分为两部分:控制面板和驱动面板.控制面板由TMS320F2812芯片,存储器,变压芯片和外围连口组成.驱动面板由IPM和相关部分组成.用语速度传感器的编码器通过芯片上的QEP电路获得实际速度,Hall传感器用于检测主回路的电流, 取样滤波后通过芯片上ADC发送的信号.用于经过A/D转换后电流反馈信号.
B.软件设计TMS320F2812提供了C/C++语言,所以我们可以用C语言编程.B.软件设计TMS320F2812提供了C/C++语言,所以我们可以用C语言编程. • 1,偏移的确定 • 模糊搜索平台的整个搜索通过编程语言,关键是如何确定模糊搜索平台中输出的位置。模糊搜索平台作为二维m*n,m=13。N=13。TMS320F2812芯片上数据存储器根据一维空间顺序表达,所以我们需要通过模糊搜索平台转换二维矩阵结构为一维数组,并且按照顺序在存储器中排列。因此,我们用“偏移起始位置”方法在存储器中确定输出的位置。偏移通过如下公式来确定: • E位于积分区域中的误差,△E是位于积分区域中的误差变化率。例如: • 存储器中输出地址为:起始地址+37
2.用C语言实现模糊PID控制器 • 通过C语言实现模糊搜索平台的搜索。我们定义三个数组分别代替△Kp搜索平台,△Ki搜索平台和△Kd搜索平台,例如:a[169],b[169]c[169]。最后通过“输出地址=数组的起始地址+偏移”获得输出。在使用程序语言的过程中实现模糊自调整PID控制器,我们必须注意以下几个问题: • 模糊规则的限幅,输入语言变量将被限制在-6到6之间。 • PID控制器输出的限幅 • 速度调整之后, 为了给下一个PID调整做为准备,流速误差, 早期的误差和更早期速度误差变量它们的值必须互相交换。
CCS2.2是用于TMS32-F2812程序开发环境的。调试程序之前,我们需要为项目添加一个头文件,C语言源文件和命令文件。在该程序中,模糊搜索平台用地址区域为0x3f9000h-0x3fA000h的DRAMHO块来定位。由于三个数组被作为局部变量定义,三个数组的起始地址是改变的。作为长度限制的结果,我仅仅列出了程序流程图和核心源程序如下(略)CCS2.2是用于TMS32-F2812程序开发环境的。调试程序之前,我们需要为项目添加一个头文件,C语言源文件和命令文件。在该程序中,模糊搜索平台用地址区域为0x3f9000h-0x3fA000h的DRAMHO块来定位。由于三个数组被作为局部变量定义,三个数组的起始地址是改变的。作为长度限制的结果,我仅仅列出了程序流程图和核心源程序如下(略)
仿真 • 为了验证该算法的可行性我们需要用Matlab/Simulink环境来仿真交流速度可调整系统。交流速度可调整系统的控制对象是PMSM,它的参数如下: • 矢量控制速度可调整算法应用在该系统中。传统的PID控制器和模糊自调整PID控制器分别用在速度回路中。控制效果如下:
结论 • 文详细描述了基于TMS320F2812 DSPs结构特征如何用C++语言编写模糊自调整PID控制器程序,并且描述了模糊自调整PID控制器的运算法则。作为一种新的电机控制的特殊用途的DSPs TMS320F2812,拥有自己高兴性能和完整的结构,将是未来运动控制领域的主流产品,所以它对于用基于TMS320F2812用编程语言实现模糊自调整PID控制有着重要的意义。最后,实验结果表明:模糊自调整PID控制器能够明显的改善系统的动态特性和静态特性。