Download
1 / 16
180 likes | 517 Views
3D Registration (Automatic Registration of 3D Data sets from Unknown Viewpoints) Sang-Hoon Kim, Jung-Kak Seo, Cheung-Woon Jho and Hyun-Ki Hong Dept. of Image Eng., Graduate School of Advanced Imaging Science, Multimedia & Film, Chung-Ang Univ., Seoul, KOREA. The Objective of Study.

E N D
3D Registration (Automatic Registration of 3D Data sets from Unknown Viewpoints) Sang-Hoon Kim, Jung-Kak Seo, Cheung-Woon Jho and Hyun-Ki Hong Dept. of Image Eng., Graduate School of Advanced Imaging Science, Multimedia & Film, Chung-Ang Univ., Seoul, KOREA
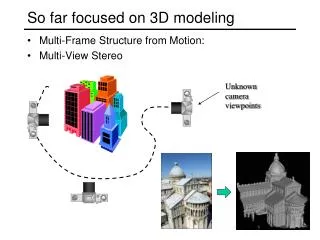
The Objective of Study Modeling a real object and environments. In the early years of computer vision - Using camera image (2D projection of the 3D world) - Difficulties : lighting variations, complex shapes... In recent years, due to the advances in 3D sensing technology - Digitized 3D surface data have become widely available - Require registration techniques
Introduction 3D Registration Finding Rigid Transformation Finding relative pose between two sensor. Projection Matrix x2=P2*X2 x1=P1*X1 λ[ R | t ]
Previous Method • Feature Based Method • - Very difficult to extract feature • A Similarity-Measured Based Method • Require optimization • (ICP algorithm)
Previous Method A Common Registration Method - Approximate registration (Mechanical positioning device, Manual assistance, Feature extraction..) - Optimize registration by ICP algorithm
T ICP Algorithm Iteratively finding closest point pairs in two surfaces Find rigid transformation (Rotation, Translation) to minimize distance between closest point pairs. [Besl 92]
ICP Algorithm • Advantage • - It does not require feature extraction • It can handle a reasonable amount of noise • Disadvantage • - Correct registration is always not guaranteed • - Require approximate registration
Proposed Method ICP algorithm + Sensor projection constraint - Reduce computation iteration - Reduce possibility of falling into a wrong local minimum - More efficient and accurate registration.
Proposed Method Sensor Projections Compute Sensor Pose Input Range data Find initial Transformation Transform Range Data & Sensor pose Find Overlaps & Closest point pairs NO Find Transformation E<threshold YES Registration
Initial Transformation • Compute Covariance matrix - Centroid of points cloud C, Covariance Matrix M : • Compute Eigenvector - Eigenvalue decomposition of covariance Matrix. - Three Eigenvectors are column vectors of U matrix. M (Covariance matrix) = UDUT • Compute Transformation H
Initial Transformation Find eigenvectors from each of data sets. Coarse registration using eigenvectors.
Proposed Method Finding overlapped regions Occluded regions From 1st sensor Self-Occluded regions from 1st sensor 2nd Sensor 2nd Sensor 1st Sensor 1st Sensor
Experimental Result Distance error of closest point pairs A common ICP Algorithm Comparison of common and proposed method Proposed Method
Experimental Result Distance error of closest point pairs A common ICP Algorithm Comparison of common and proposed method Proposed Method
Experimental Result Registration of multiple range data sets from unknown views