Download

1 / 8
80 likes | 238 Views
Hovedprosjekt Vår 2001. LTT – Lead-Through Teaching. John Einar Reitan Ketil Johnsen Anders Jensen Veileder: Helge Hafting. Presentasjonen. Bakgrunn for valg av oppgave Oppdragsgiver Problembeskrivelse Litt om systemet Status / videre framdrift. Hvorfor denne oppgaven?.

E N D
Hovedprosjekt Vår 2001 LTT – Lead-Through Teaching John Einar Reitan Ketil Johnsen Anders Jensen Veileder: Helge Hafting av: John Einar Reitan Ketil Johnsen og Anders Jensen
Presentasjonen • Bakgrunn for valg av oppgave • Oppdragsgiver • Problembeskrivelse • Litt om systemet • Status / videre framdrift av: John Einar Reitan Ketil Johnsen og Anders Jensen
Hvorfor denne oppgaven? • Tverrfaglig • Utfordrene • Nytenkende • Målrettet av: John Einar Reitan Ketil Johnsen og Anders Jensen
Oppdragsgiver PPM AS er et nyopprettet firma, med utspring i SINTEF-miljøet. PPM vil utvikle og selge robotprogrammeringssystemer og tjenester for å øke anvendelsen av industrirobotsystemer i bedrifter med små og mellomstore produksjonsserier. av: John Einar Reitan Ketil Johnsen og Anders Jensen
Problembeskrivelse Økende behov for automatisering • Fysiske belastende arbeidsoppgaver • ”video- og pizza generasjonen” • Betydelige kostnader ifm. skader, sykefravær og rekruttering av: John Einar Reitan Ketil Johnsen og Anders Jensen
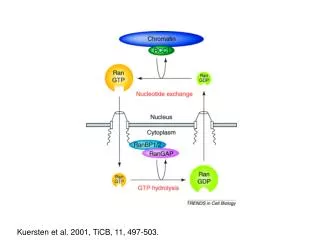
Systembeskrivelse Posisjoneringsarm. • Gir mulighet for å beskrive en bevegelse. • Gir mulighet for å beskrive omgivelser rundt robot. Program. • Gir mulighet for å se bevegelsen som er beskrevet med posisjoneringsarm. • Gir mulighet for å redigere bevegelsen. • Gir mulighet for å eksportere bevegelsen som et program til en robot. av: John Einar Reitan Ketil Johnsen og Anders Jensen
Systemskisse av: John Einar Reitan Ketil Johnsen og Anders Jensen
Status / Videre Framdrift • Godt så langt • Tror vi blir ferdige av: John Einar Reitan Ketil Johnsen og Anders Jensen